X
Схема робота футболиста на контроллере arduino nano для игры в робофутбол электронным мячом
Скачать: Программа робота, как у робота из ролика
Ролик про то, как это работает
Схема подключения датчиков инфракрасного импульсного мяча
Для подключения инфракрасных фототранзисторов используется пара аналоговых мультиплексоров. Каждый датчик содержит по 6 фототранзисторов. Таким образов переключаясь между фототранзисторами снимается информация с тркх сторон относительно робота спереди, справа, слева.
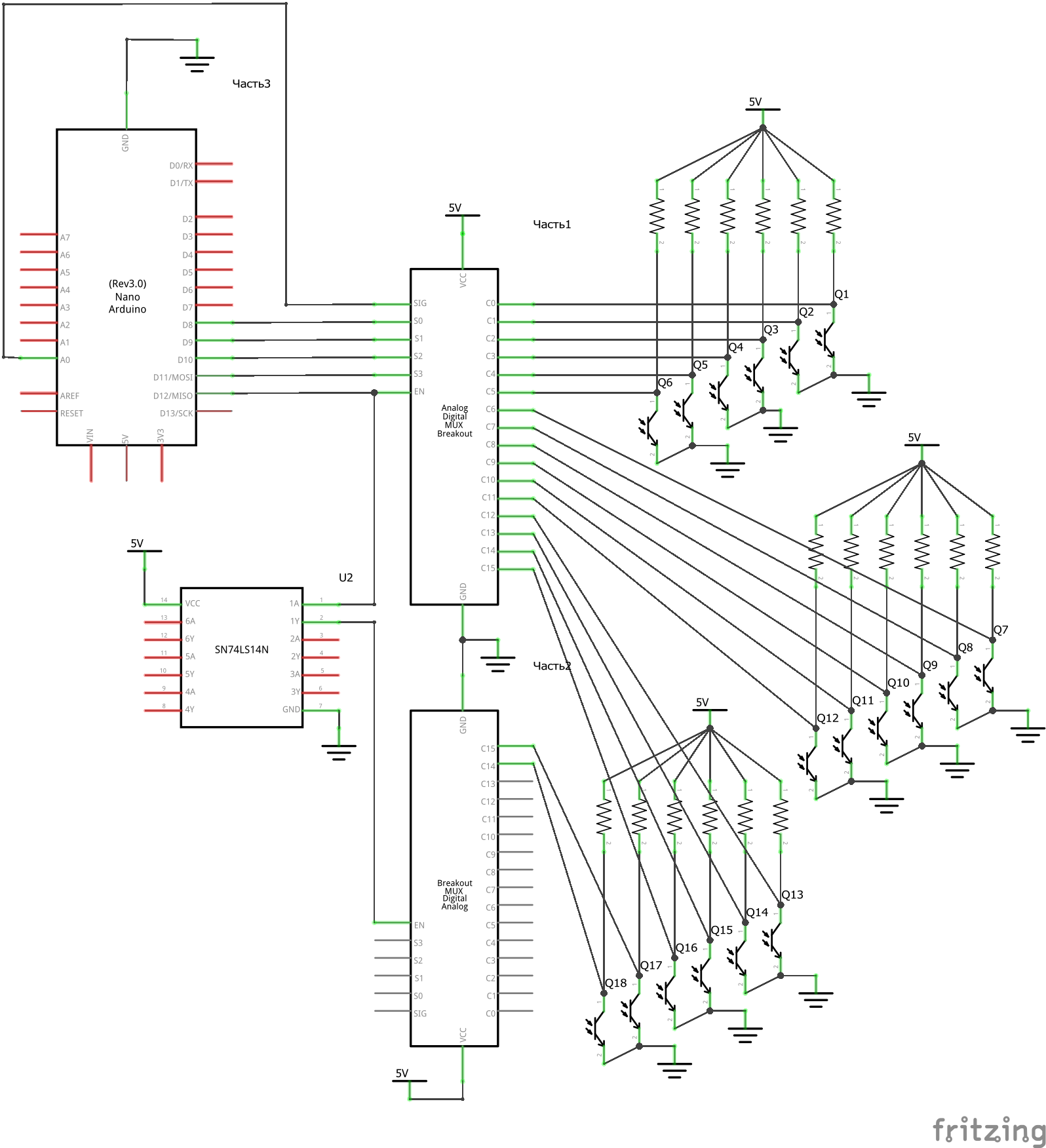
Схема подключения гироскопа и электронного компаса.
На роботе установлен распространенный гироскоп - акселерометр MPU-6050 (на схеме установлен другой прибор, т.к. небыло примитива) и компас HMC5883
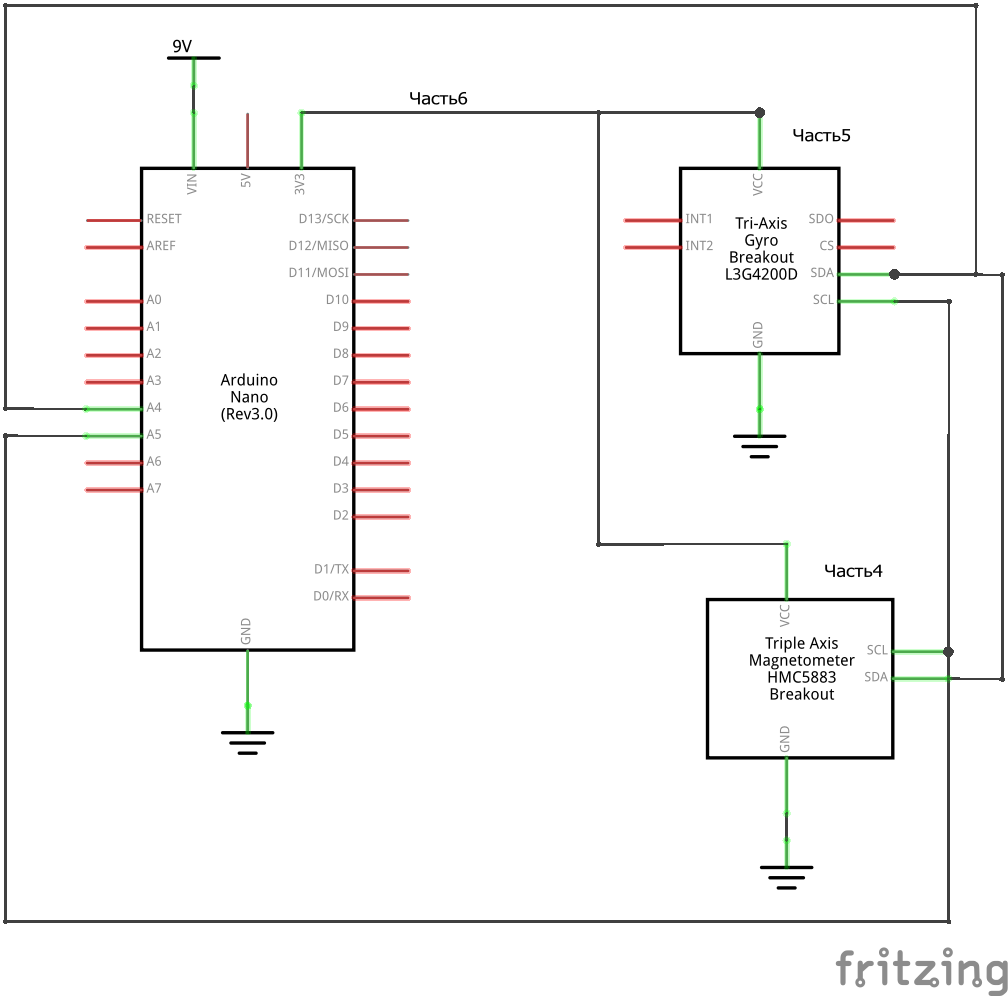
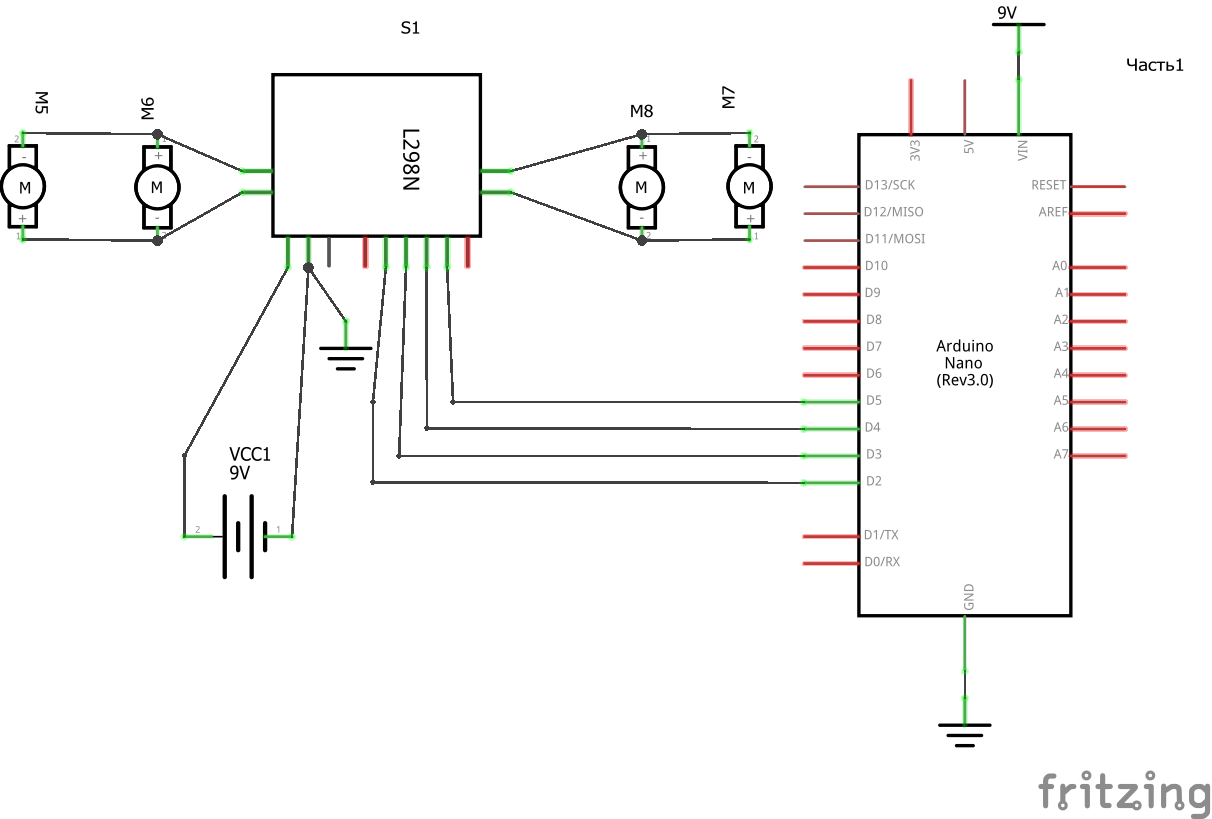
Схема подключения управления ходовых двигателей
Моторы управляются как на схеме ниже.