
X
Механика робота на контроллере ESP32 с 2 шаговыми моторами и памятью команд (траектории движения)
- Описание сборки механики робота
- Описание сборки электроники робота
- Программное обеспечение робота
- Архив с программой (Arduino) для робота
- Ссылка на ролик Youtube по данному роботу
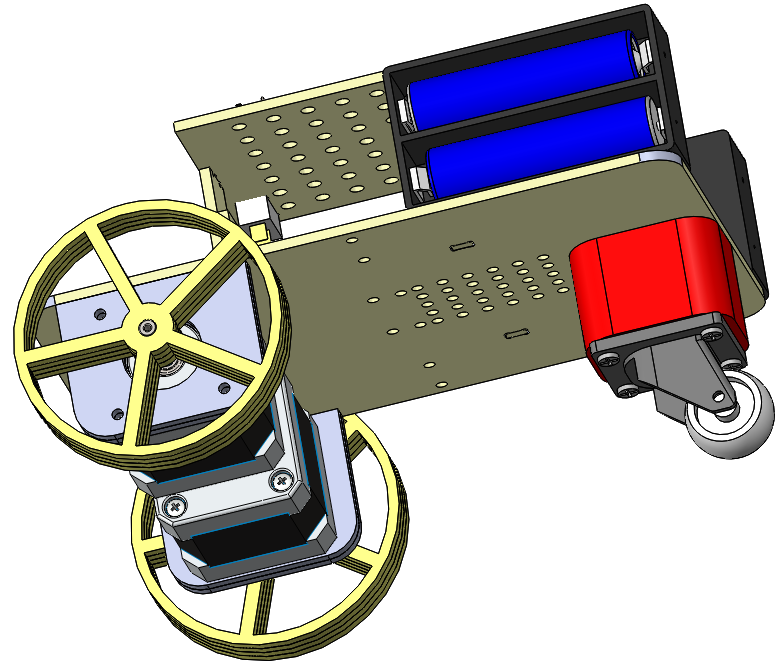
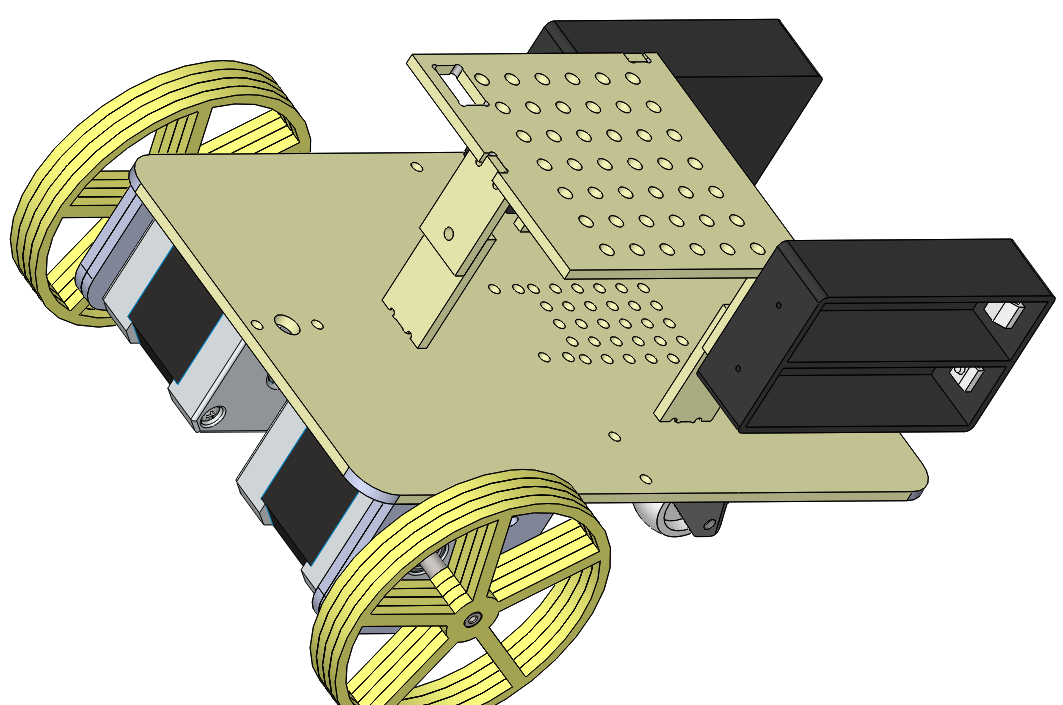
Собираем робота на двух шаговых моторах с передним/задним вращающимся колесом.
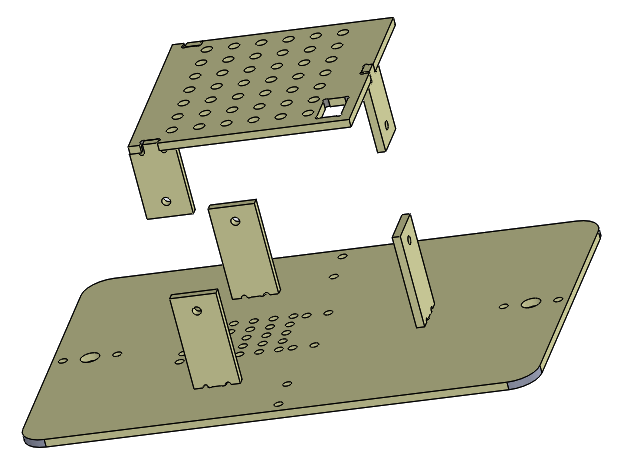
В результате полной сборки получится робот изображенный на следующей паре рисунков:
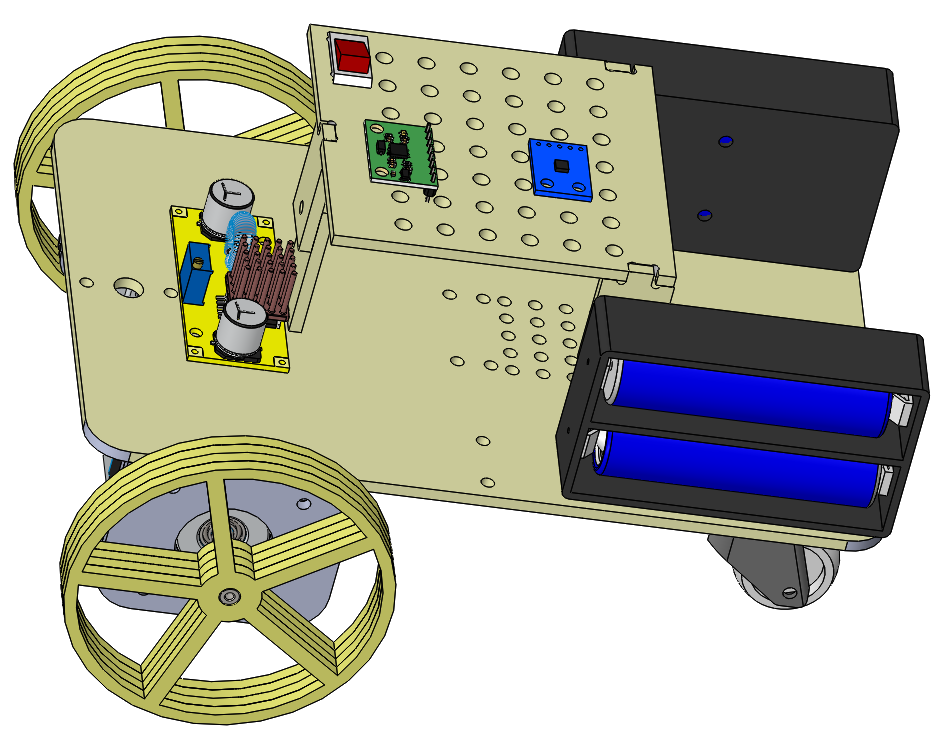
В состав робота помимо электроники входят следующие стандартные части:
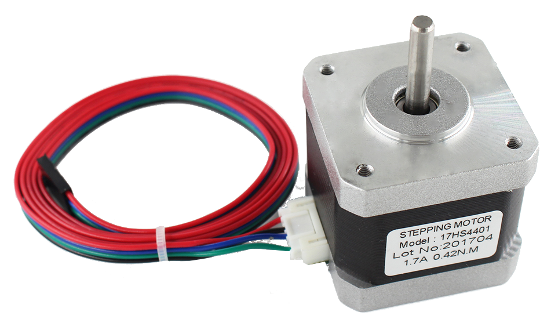
- пара шаговых моторов 17HS4401;
- свободно вращающееся колесо с на поворотной оси;
- пара аккумуляторных боксов (по 2шт 18650).


Подготовим стандартные компоненты и займемся сборкой корпуса робота.
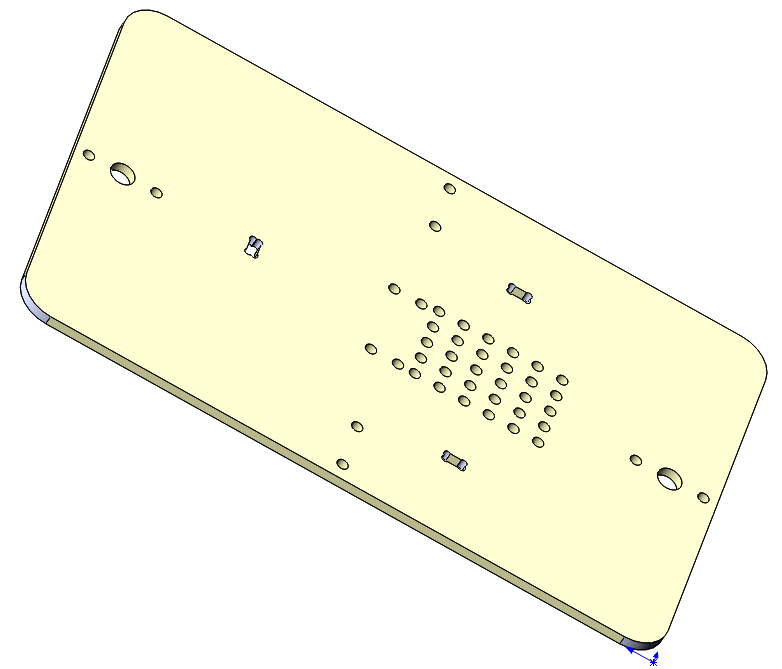
Сборка корпуса робота производится на основе базы, к которой крепится все остальное. База имеет технологические отверстия для крепления стоек и прокладки проводов.
Установим на базу верхний уровень, он служит для расположения электроники и выключателя.
Стойки к верхнему уровню клются суперклеем или при помощи термопистолета (термоклеем).
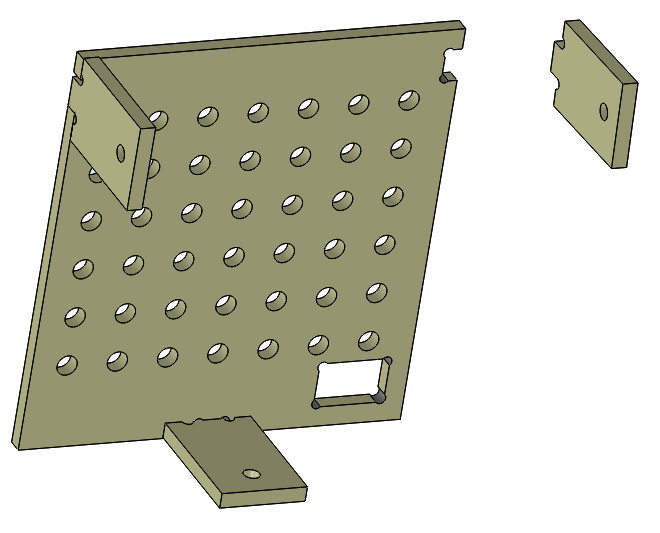
Аналогично устанавливаем и закрепляем клеем стойки в отверстия базы.
Скрепляем верхние и нижние стойки между собой 3мм винтами длиний 10-15мм.
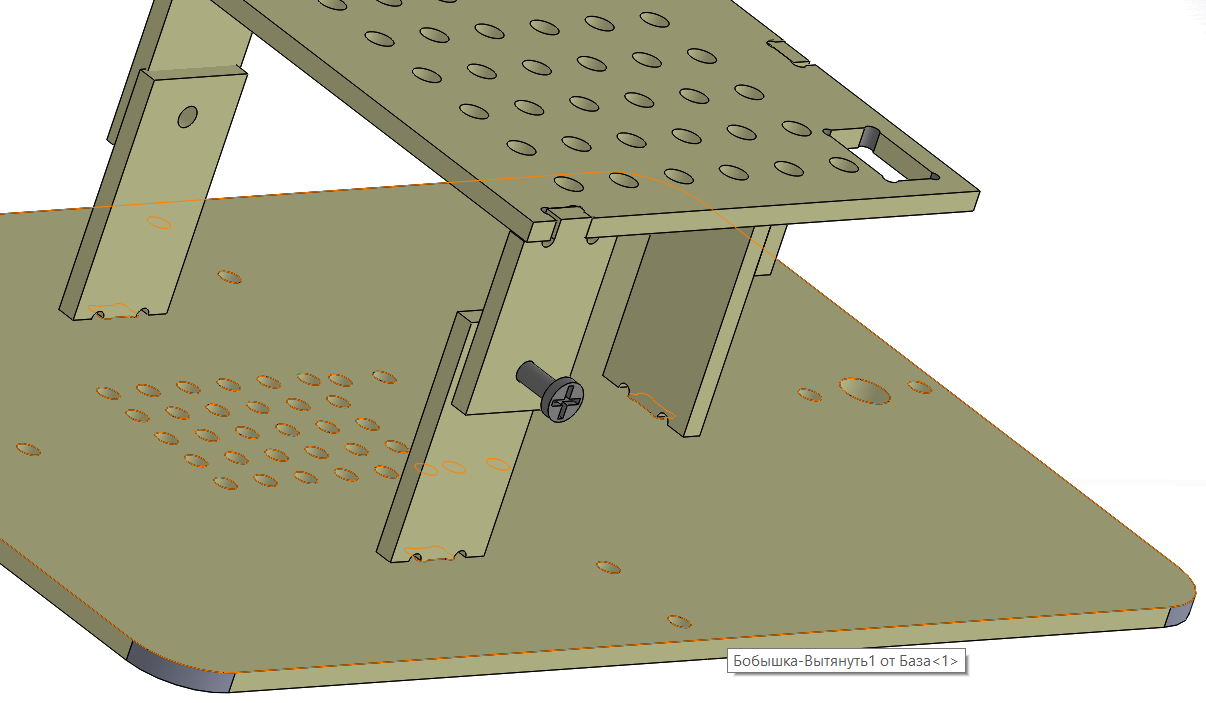
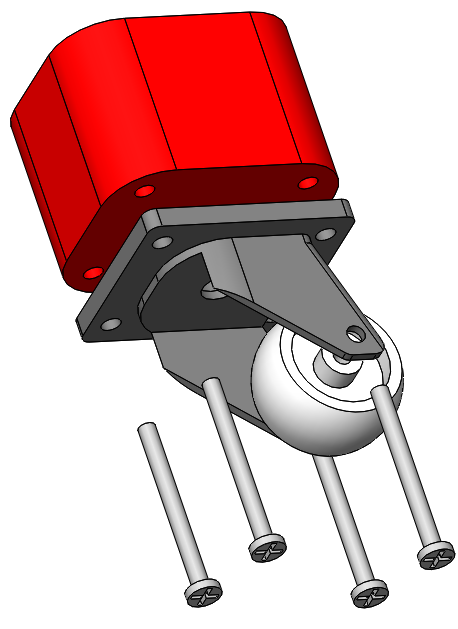
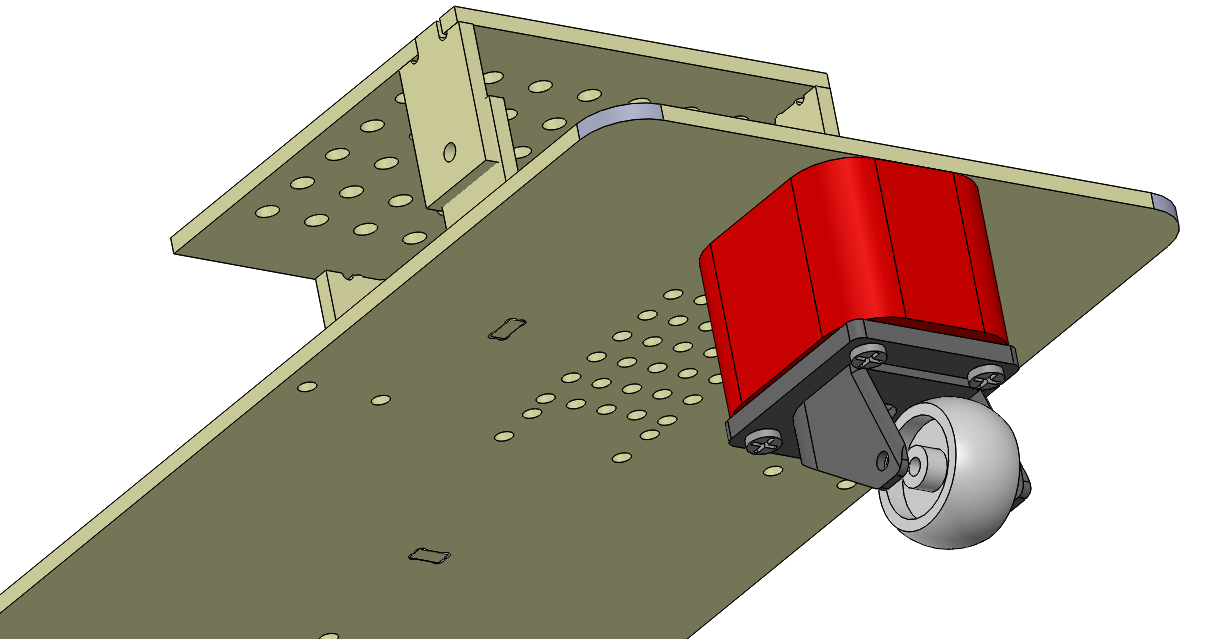
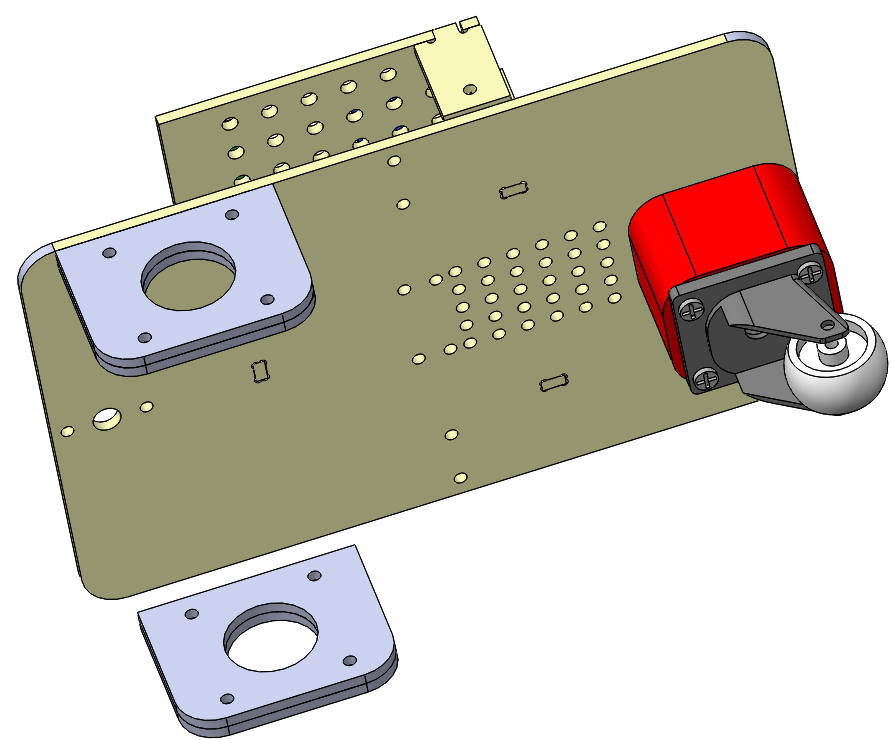
Третье свободное колесо крепиться через переходную тумбу, которая служит для нормализации высоты третьего колеса.
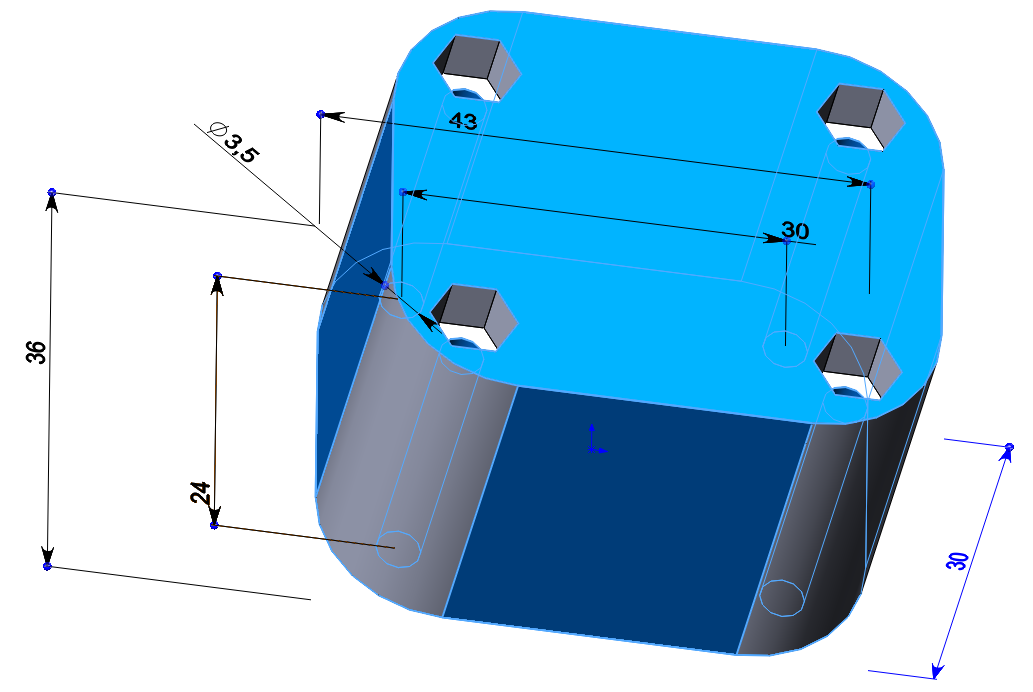
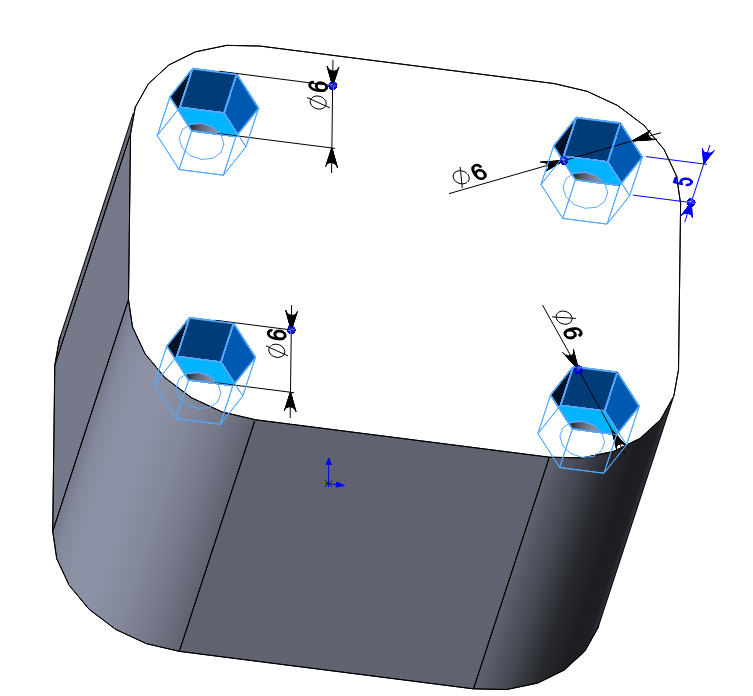
Следует использовать 3мм винты длиной 30мм.
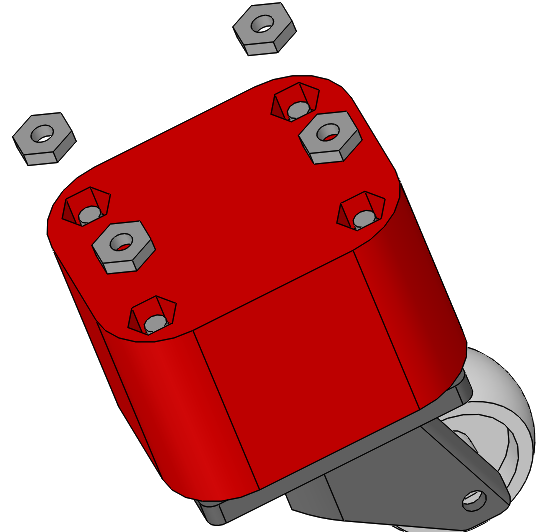
Тумба крепится к базе суперклеем строго по центру передней стороны.
Шаговые двигатели крепятся винтами к соответвующим стойкам, для прочности стойки из 3мм фанеры склеены по две.
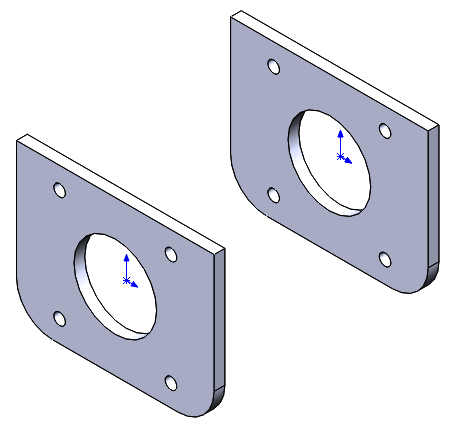
Стойки фиксируются на корпусе суперклеем с содой, как показано на рисунке.
Двигатели закрепляются на стойках при помощи 4х винтов диаметром 3мм и длиной 12-13мм.
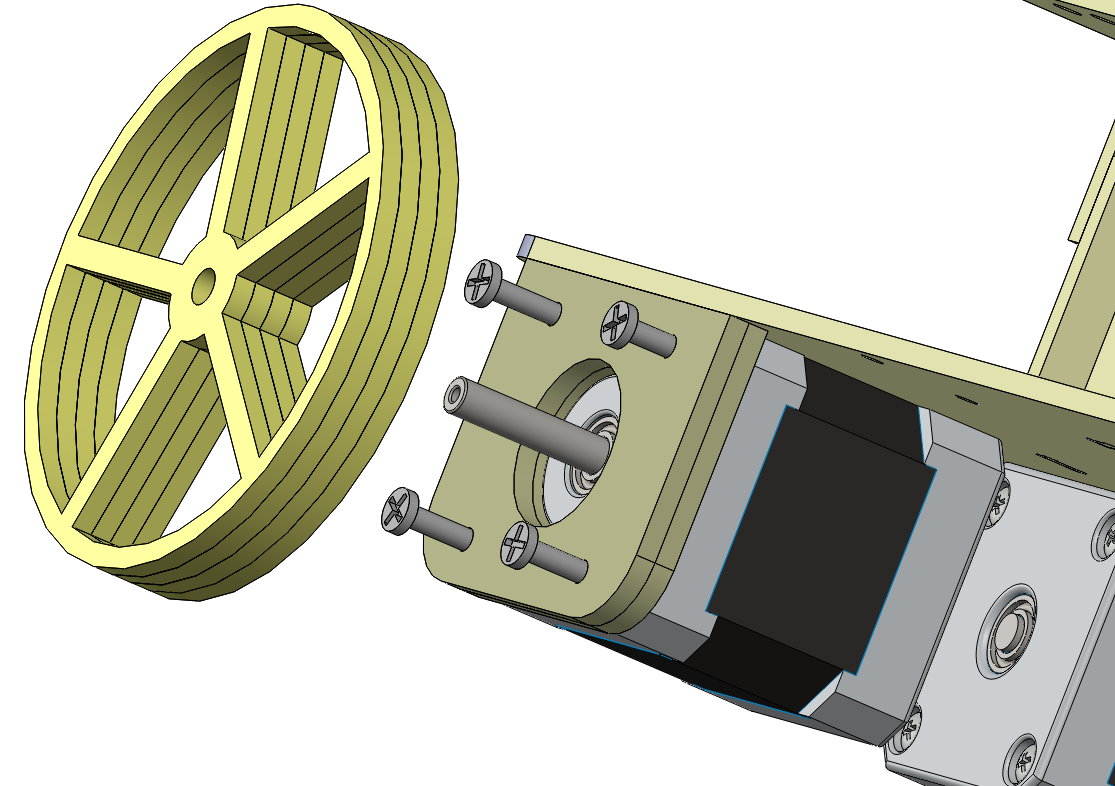
Колеса собираются из четырех 3мм слоем для создания ширины колеса (12мм). Полученное широкое колесо обрамляется шиной из пористой резины.
Колесо насаживается на ось. К сожалению прочность насадки не гарантирует отсутствие вращения колеса на оси, чтобы этого избежать следует капнуть суперклей между осью и отверстием колеса.

Теперь можно установить боксы для аккумуляторов, для того чтобы сбалансировать распределение массы робота, боксы выносятся в переднюю часть и крепяться на суперклей с осодой или термоклей.
Корпус робота готов, пора приступать к монтажу электроники и драйверов.