Новости

При поддержке Фонда содействия инноваций в рамках Федерального проекта «Платформа университетского технологического предпринимательства» создано новое малое предприятие ООО "ЮНИТ", специализирующееся на производстве робототехнических систем для сельского хозяйства. Изготовлен действующий образец робота подталкивателя кормов для использования на животноводческой ферме.
Подробней...

Робототехника и автоматизация в строительстве.
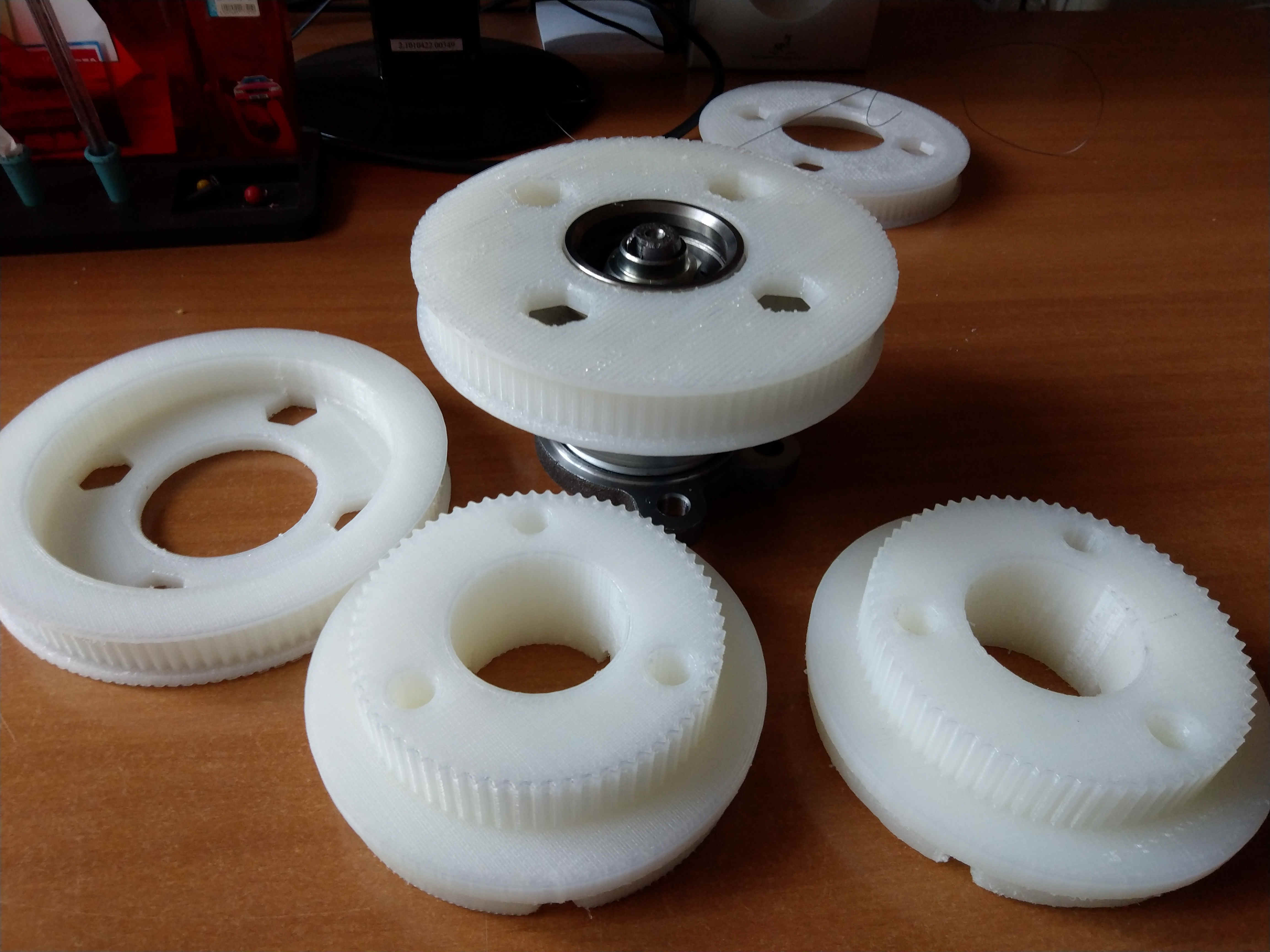
Нейлоновые нагруженные детали по моделям заказчиков или по нашим моделям.
Внимание Новинки:
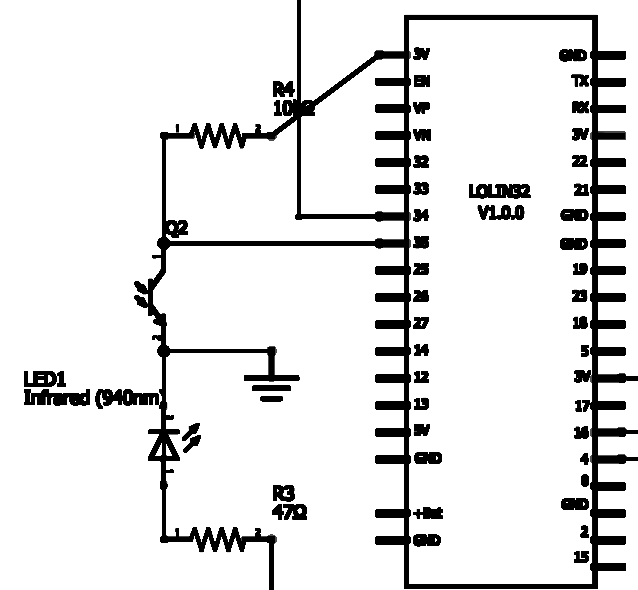
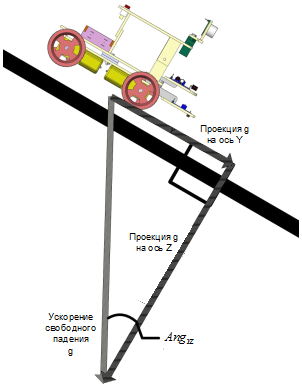
Балансирующий робот на базе ESP32 в среде Arduino IDE + КНИГА
Хотите разобраться, как работают шаговые моторы и научиться ими управлять? Тогда вам поможет моя новая книга "Мобильные роботы на базе ESP32 в среде Arduino IDE"

Автор: Михаил Момот «Мобильные роботы на базе ESP32 в среде Arduino IDE», в которой в форме практических проектов для начинающих конструкторов описано создание мобильных роботов на новых высокоскоростных контроллерах ESP32.
https://www.ozon.ru/product/mobilnye-roboty-na-baze-esp32-v-srede-arduino-ide-180061880/
https://bhv.ru/product/mobilnye-roboty-na-baze-esp32-v-srede-arduino-ide/
https://www.chitai-gorod.ru/catalog/book/1254600/
https://www.labirint.ru/books/753861/
А вот и конструктор по книге подоспел: https://bhv.ru/product/balansiruyushhij-robot-na-baze-esp32-v-srede-arduino-ide/.
Обзор статей
Последние разработки
Справочные материалы
Наша лаборатория робототехники развивается в трех направлениях:
- Промышленное роботостроение и автоматизация технологических процессов;
- Разработка сервисных роботов.
- Обучение робототехнике, работа с молодежью.
Промышленное роботостроение и автоматизация технологических процессов.
В области промышленного роботостроения мы конструируем оригинальных роботов, которые автоматизируют производственные процессы, работая по заказам и в тесном сотрудничестве с производственниками. Наша команда включает в себя специалистов в области механики, сварочного производства, электроники и программирования роботов, рободизайна.
В настоящее время реализованы проекты роботизации сварочного производства ряда крупных предприятий Сибири.
Есть опыт создания роботов для пищевой промышленности.
Мы имеем навыки разработки промышленных роботов с «нуля», т.е. когда заказчик знает только цель – чего он хочет достигнуть. В этом случае проводятся предварительные исследования, поиск прототипов (в том числе и патентный поиск), разрабатываются эскизы, идет обсуждение с заказчиком, утверждаются основные принципы работы, дизайн.
На следующем этапе производится разработка прототипов: 3d-моделирование, сборка, составление упрощенных программных алгоритмов, прорабатываются упрощенные электрические схемы.
Далее прототипы доводятся до рабочего состояния и предъявляются заказчику на согласование деталей. После согласования, мы приступаем к производству.
Мы используем опыт накопленный специалистами:
- Кузбасского государственного технического университета;
- Национального исследовательского Томского политехнического университета;
- Федерального исследовательского центра угля и углехимии Сибирского отделения Российской академии наук.
Разработка сервисных роботов.
В рамках разработки сервисных роботов лабораторией конструируются модели роботов используемых на предприятиях общественного питания, предприятиях торговли. Роботы данного направления обслуживают клиентов, например, разносят и принимают заказы в кафе, роботы завлекают и развлекают клиентов. К подобным роботам относятся серии Zizibot и «Сервисный балансирующий робот для кафе».
По направлению «Сервисных роботов» мы готовы реализовывать любые, даже кажущиеся сумасшедшими идеи (в рамках Законов РФ).
Обучение робототехнике, работа с молодежью.
Понимая важность государственной политики в области технического образования, а также по причине кадрового дефицита, Лаборатория вкладывает в работу с молодежью все свободное от основной деятельности время и все имеющиеся свободные средства. Нами проводятся курсы робототехники для школьников, студентов и всех желающих. Мы конструируем наборы для технического творчества, ведем образовательный канал на Youtube. Момотом Михаилом Викторовичем написана и поддерживается (вышло второе издание) книга по робототехнике «Мобильные роботы на базе Arduino», она находится в свободной продаже.