
X
Сборка электроники робота с памятью команд/траектории движения
- Описание сборки механики робота
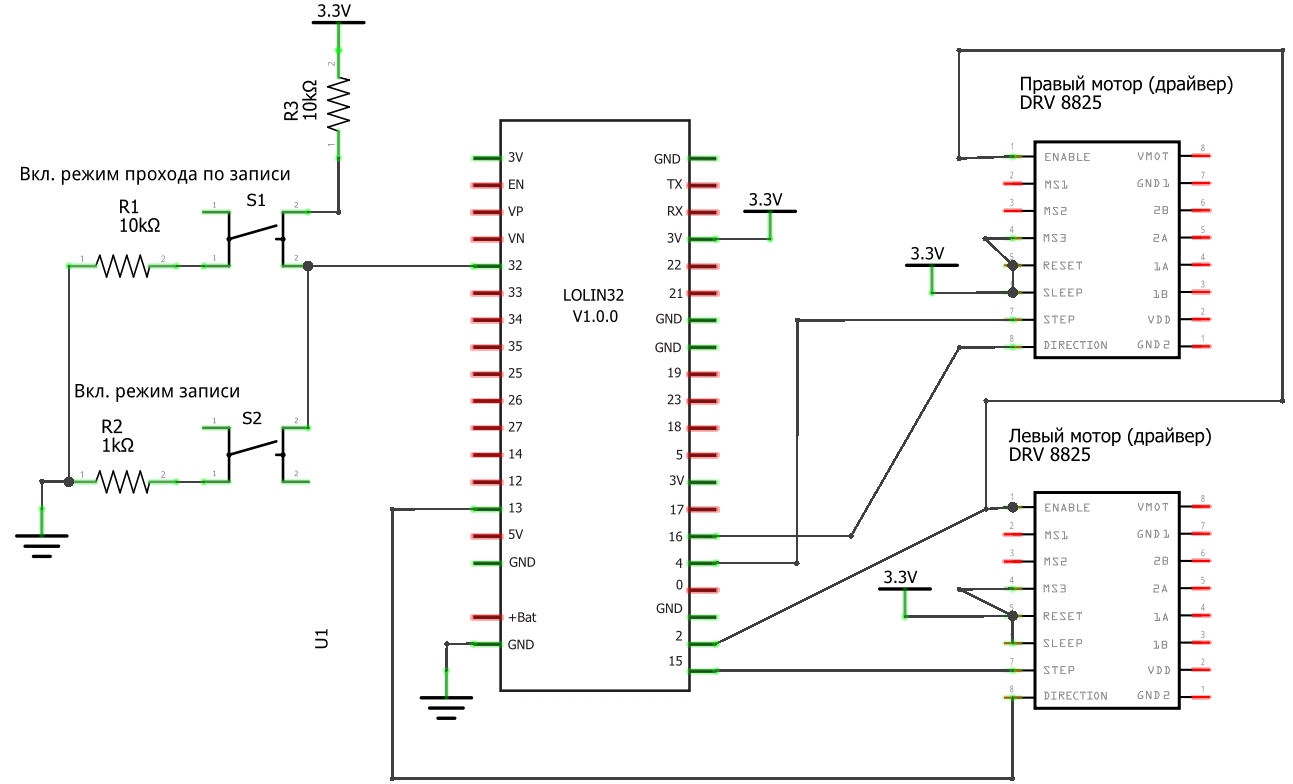
- Описание сборки электроники робота
- Программное обеспечение робота
- Архив с программой (Arduino) для робота
- Ссылка на ролик Youtube по данному роботу
Сборка электроники данного робота не сильно отличается от первого робота на ESP32(см.ссылку) .
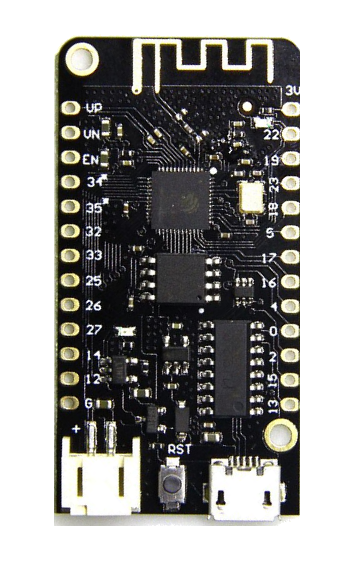
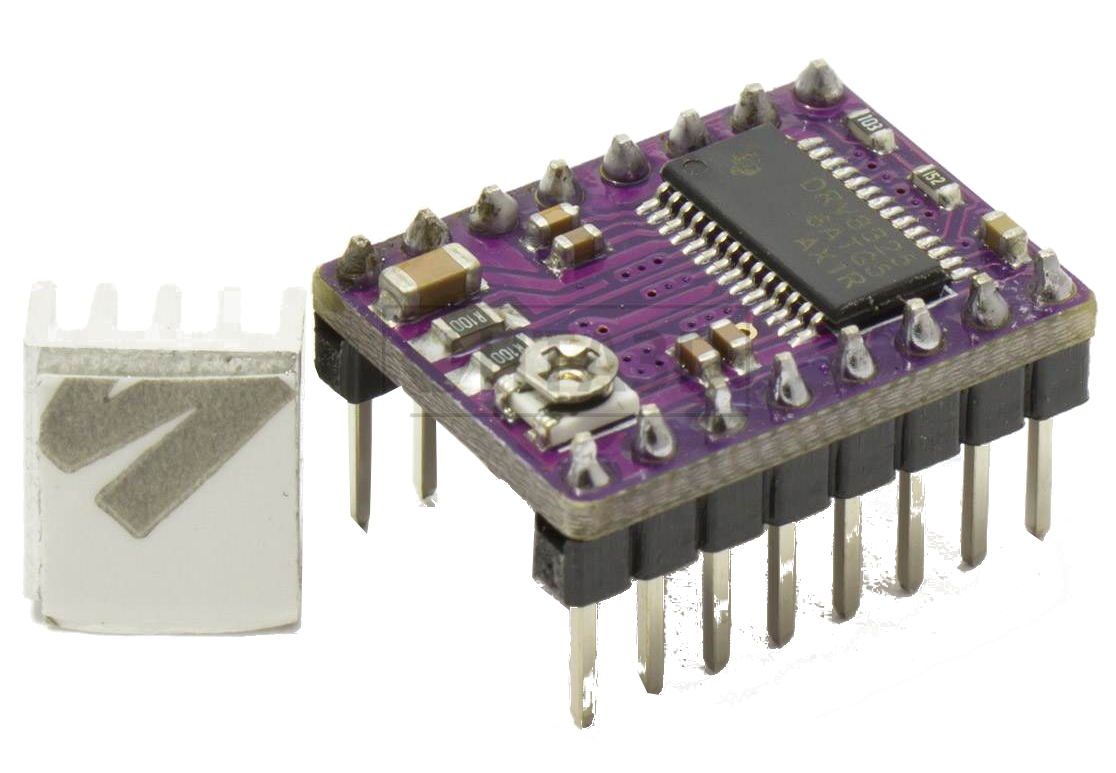
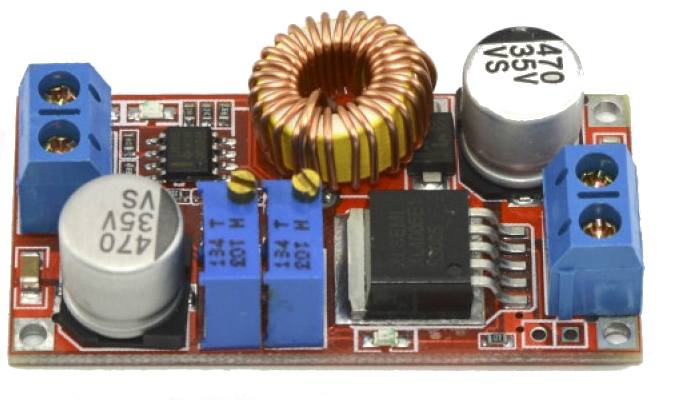
Используется контроллер ESP32 Lolin Lite. Драйвера шаговых моторов DRV8825. Для понижения напряжения используется импульсный DC-DC step-down преобразователь.
Питание робота осуществляется от 4х последовательно соединенных аккумуляторов 18650.
Драйвера следует использовать с радиаторами. Я наклеил радиаторы ни сверху, а снизу платы напротив микросхемы, т.к. без радиатора тепло рассеивается через метализацию платы.
Понижающий преобразователь понижает напряжение до 5 вольт, это напряжение подается на ESP32, но так как клеммы питания 5 вольт на плате нет, то я присоединил +5вольт к + разъема для аккумулятора на плате.
В схему питания добавлена схема контроля в виде делителя R1 - R2, на 35GPIO снимается аналоговый сигнал и проверяется по нижнему порогу, если нижний порог пройден, то двигатели обесточиваются.
Цель этого в предотвращении полного разряда аккумуляторов, что может привести к выходу их из строя.
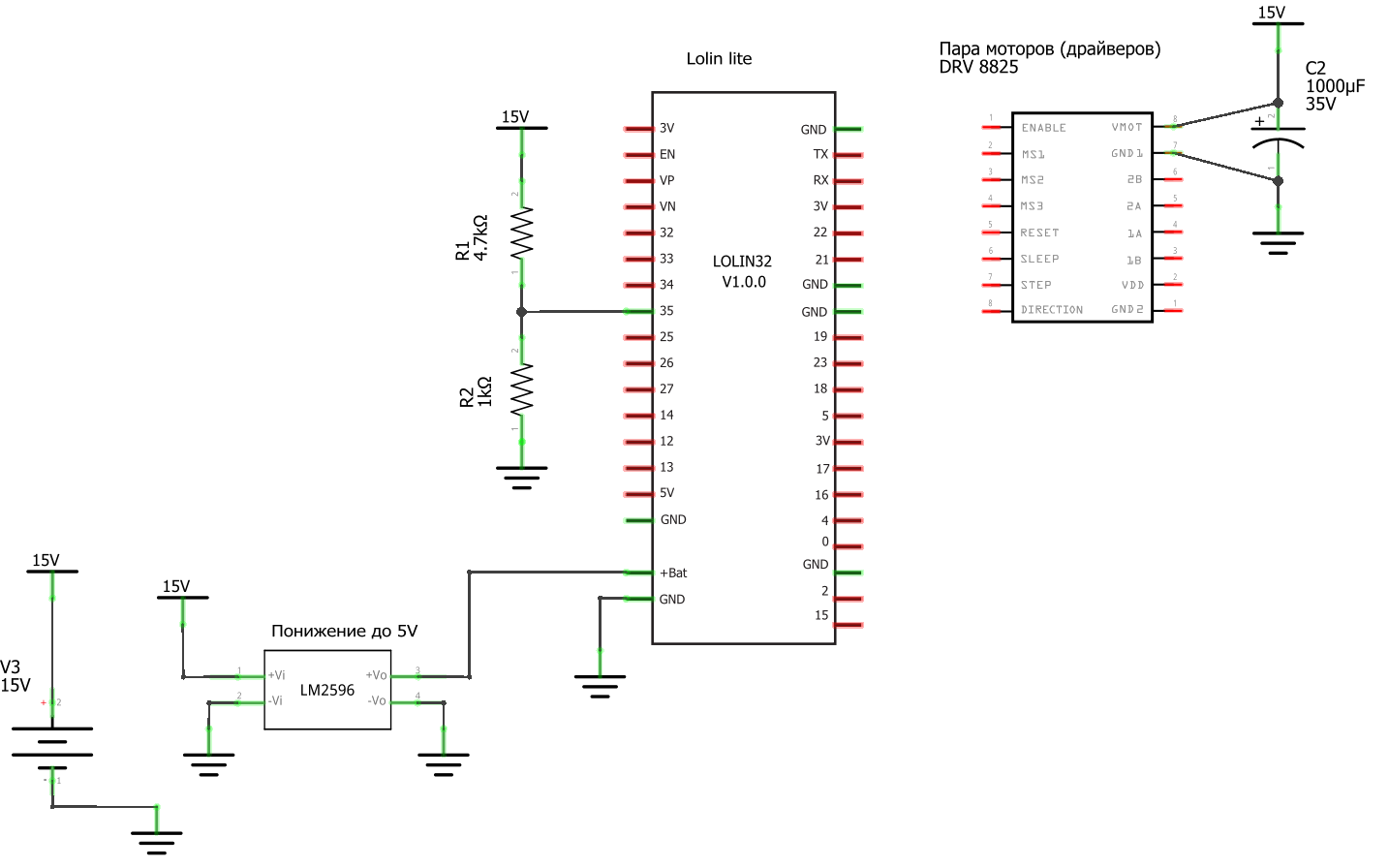
К 32 GPIO подключен блок кнопок, считывание аналогового сигнала с которых позволяет выбрать, какие функции робота использовать.
После того, как электроника собрана можно приступать к программированию.