
X
Конструируем робота для робобаскетбола
Ссылки
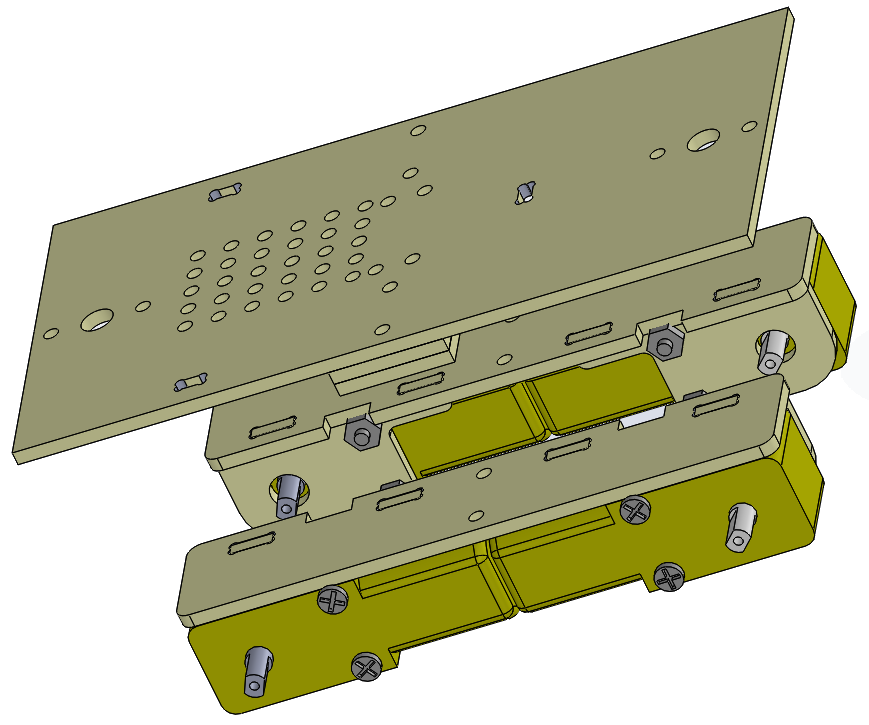
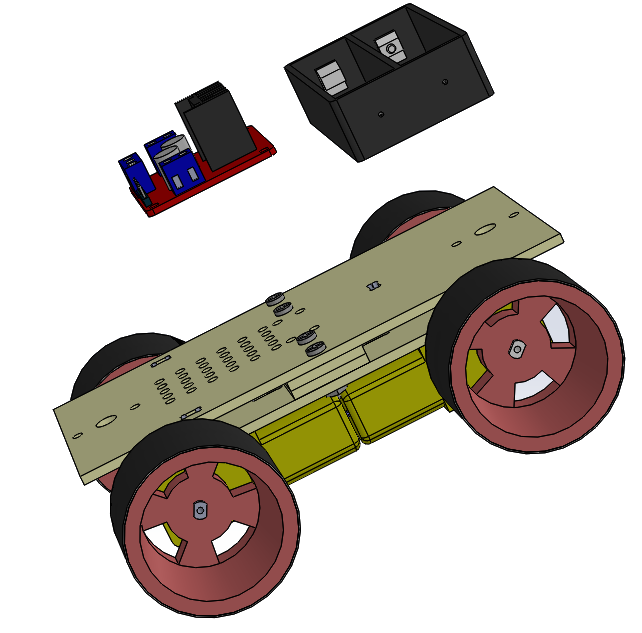
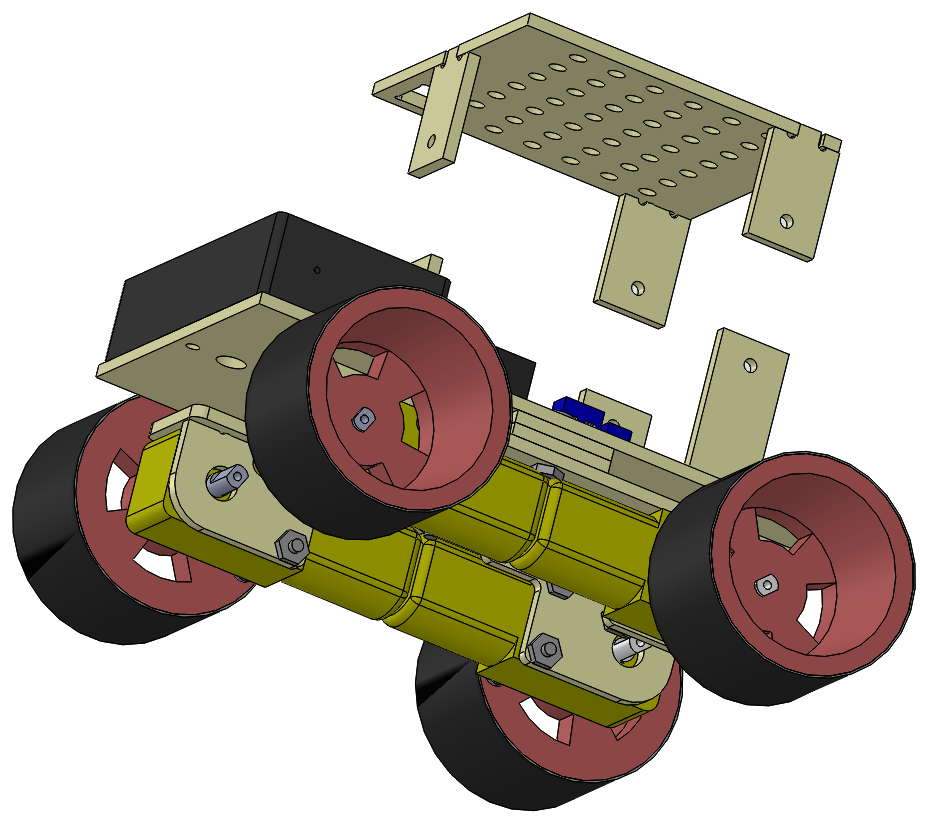
Начнем сборку с ходовой части. Для крепления деталей в пазах следует использовать клей.
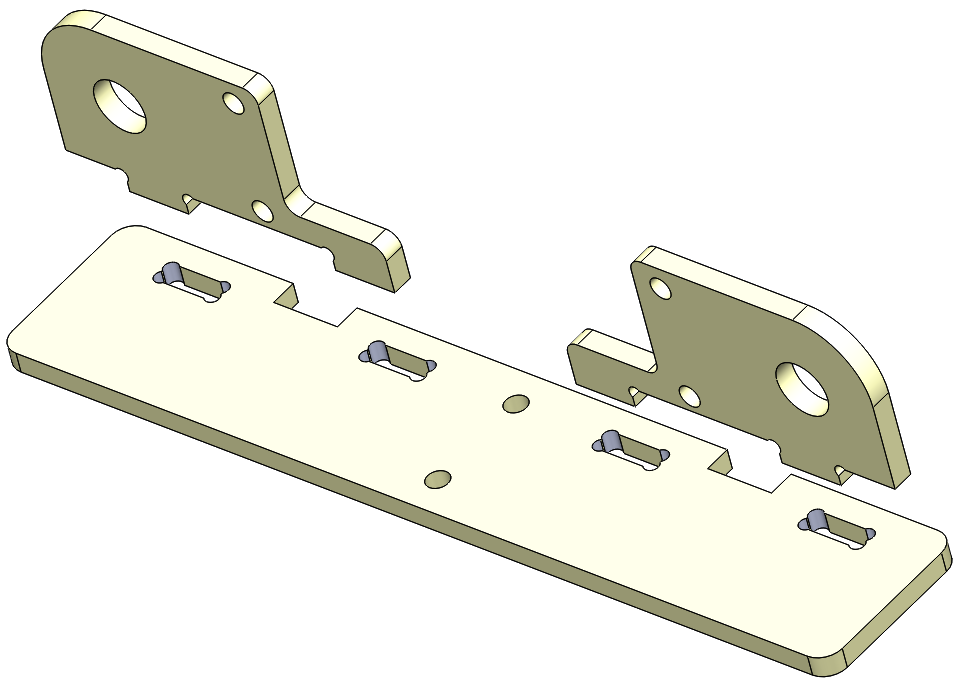
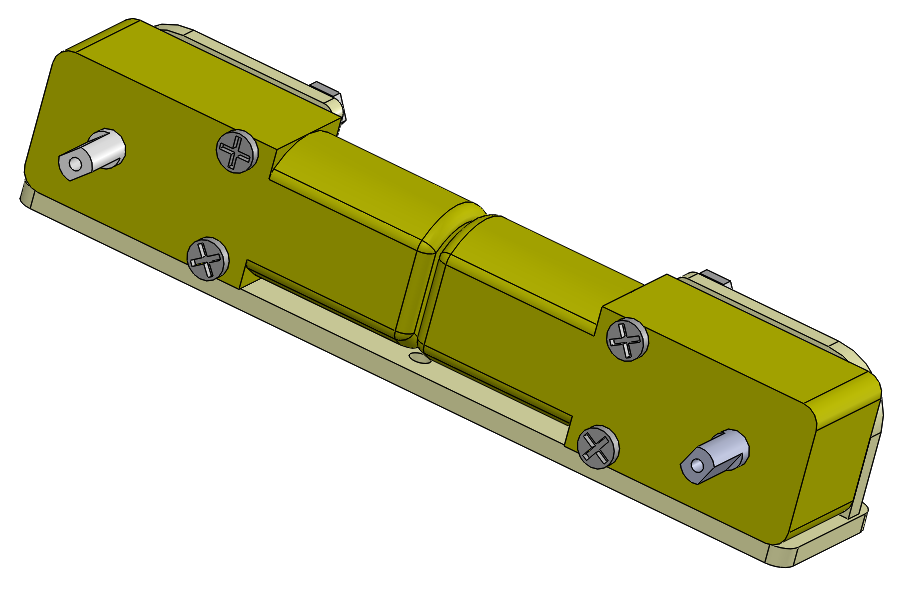
После того, как крепление для моторов подготовлено, можно установить сами моторы с редукторами. Предварительно к моторам должны быть припаяны провода и гасящие помехи конденсаторы.
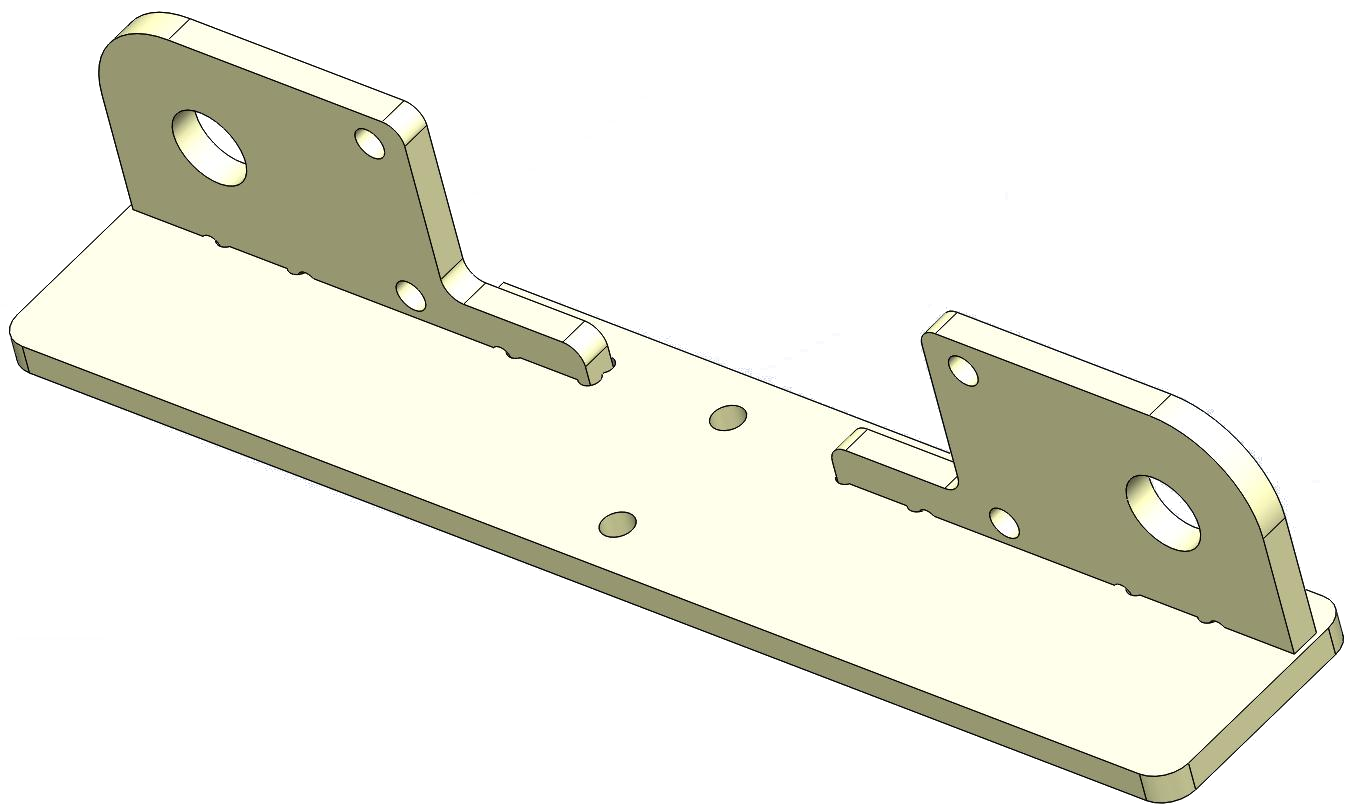
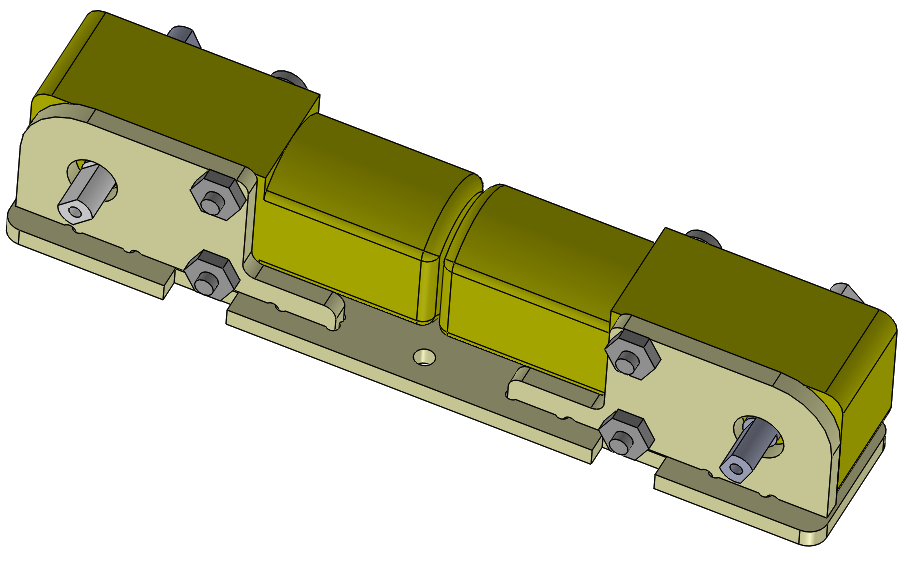
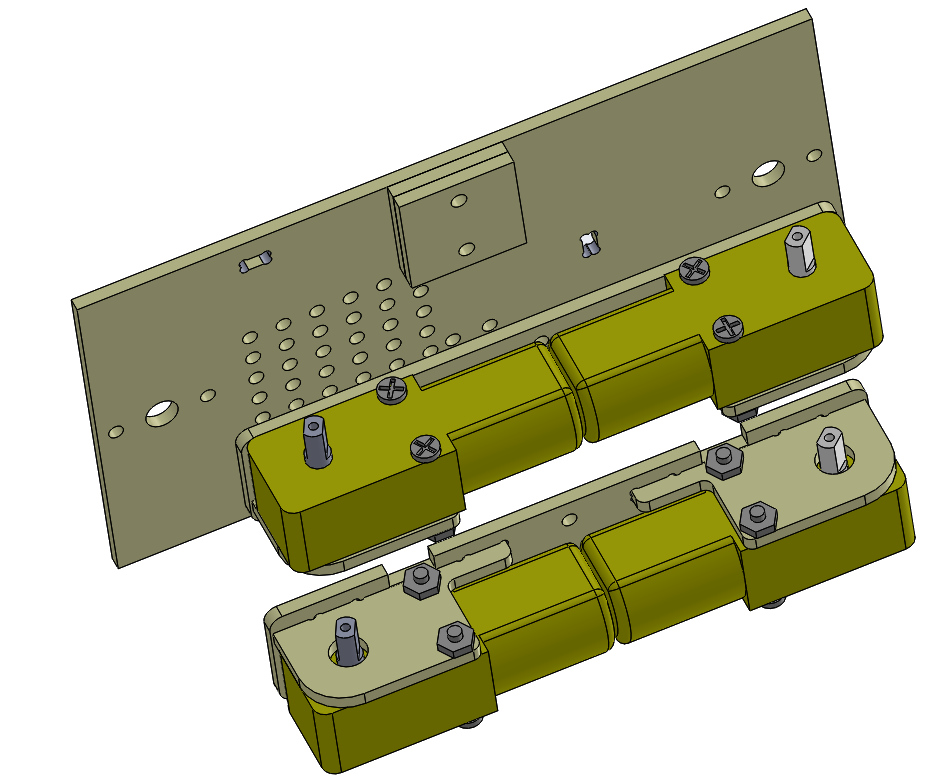
Моторы будут практически соприкасаться друг с другом. Моторы можно закрепить при помощи винтов, как указано на следующих рисунках, а можно при помощи термоклея, при этом следует зачистить крупной наждачной бумагой часть мотора, которая пойдет под клей.
При склеивании следует следить, чтобы клей не попал на вал и чтобы прослойка клея между мотором и крепежем была минимальной.
Теперь следует приклеить ходовую часть к корпусу, при этом проклейка проводится через две проставки, они служат для создания эффекта аммортизации.
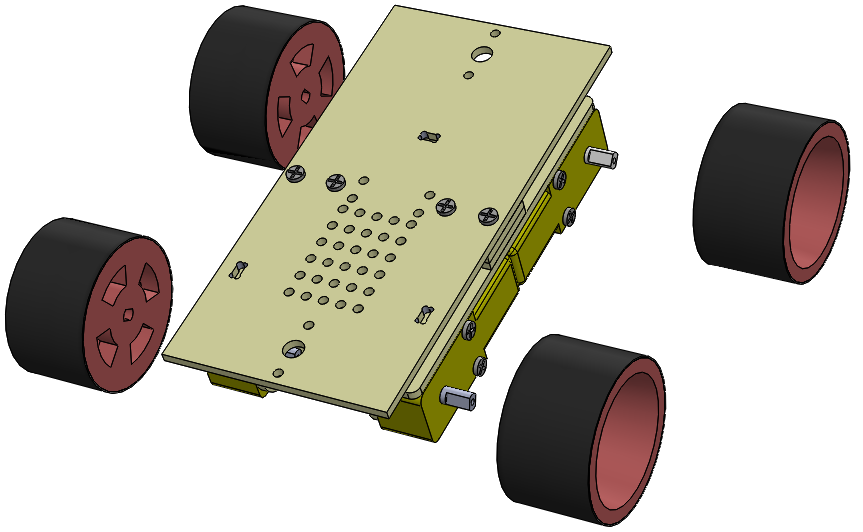
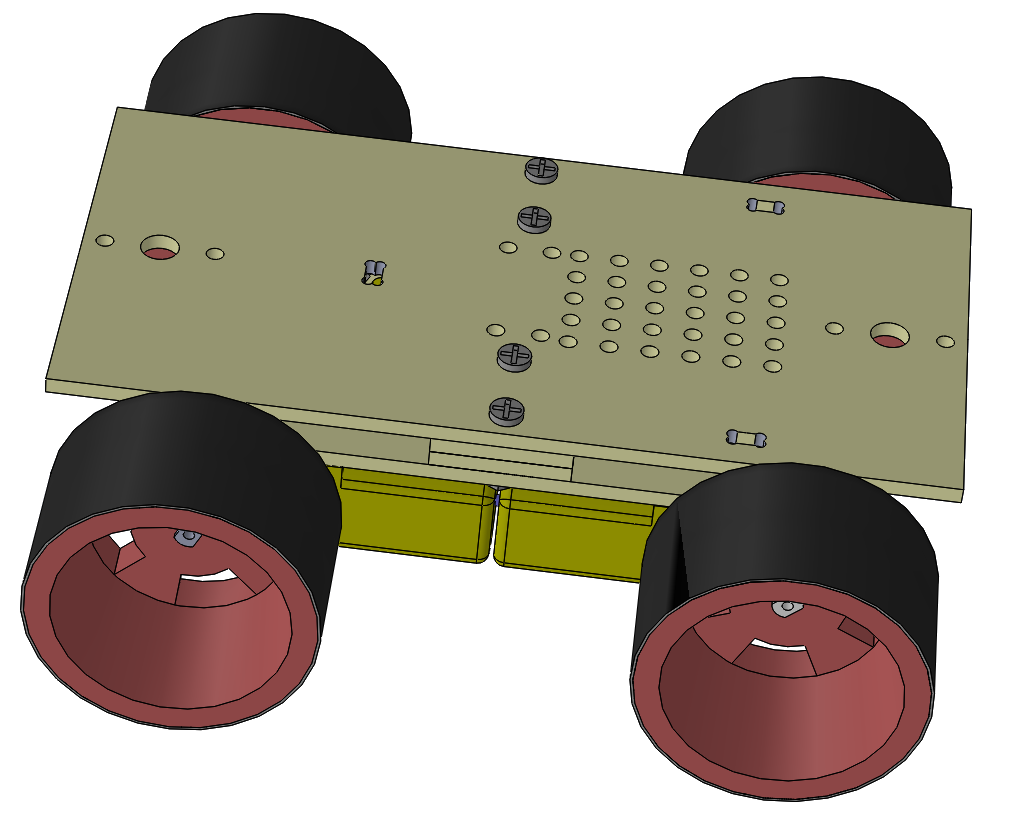
Можно установить колеса, они установливаются в паз на вал редуктора. Если колесо встает не плотно, его можно закрепить винтом 3мм с внешней части вала, при этом вал расширится и зафиксируется на колесе.
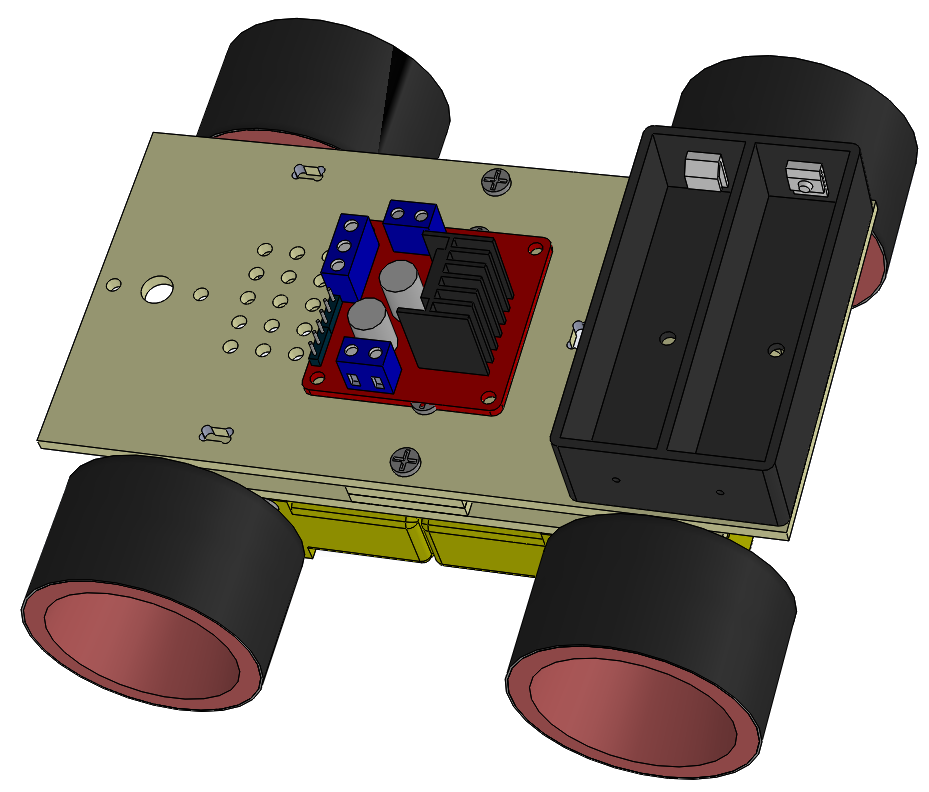
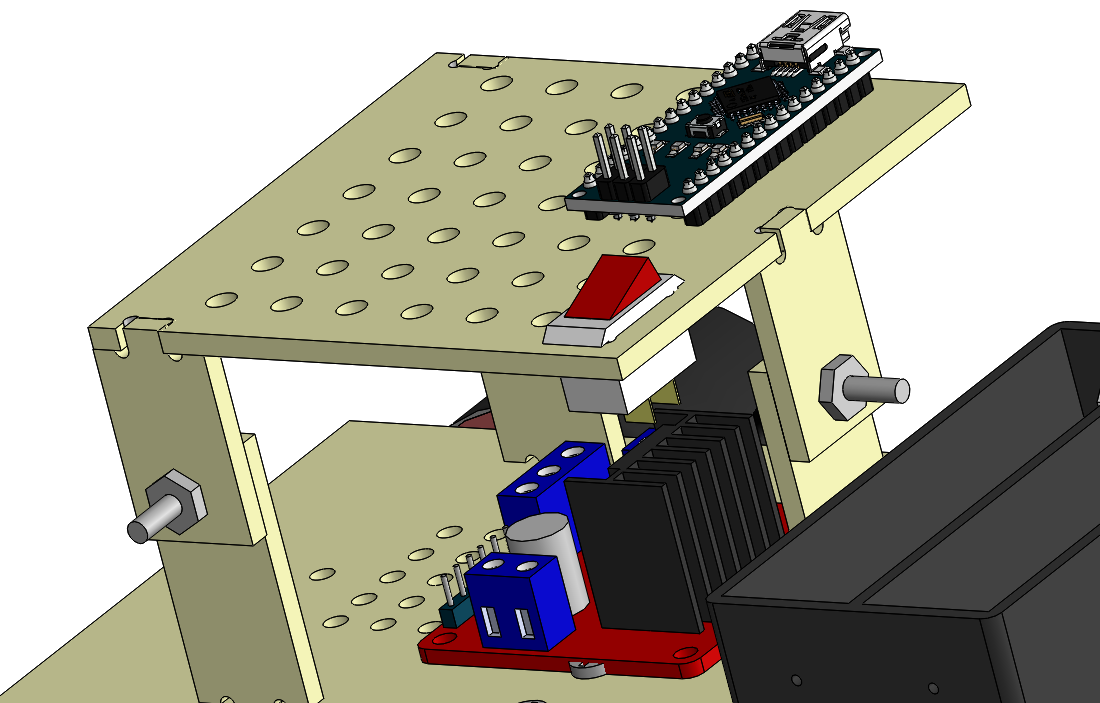
Пришло время устанавливать драйвер моторов и бокс для аккумуляторов. Установку следует производить по рисункам. Бокс крепиться на клей, драйвер на пару витов или клей.
Перед креплением драйвера к нему следует подвести провода.
Устанавливаем верхний уровень корпуса робота, стойки крепим клеек к корпусу.
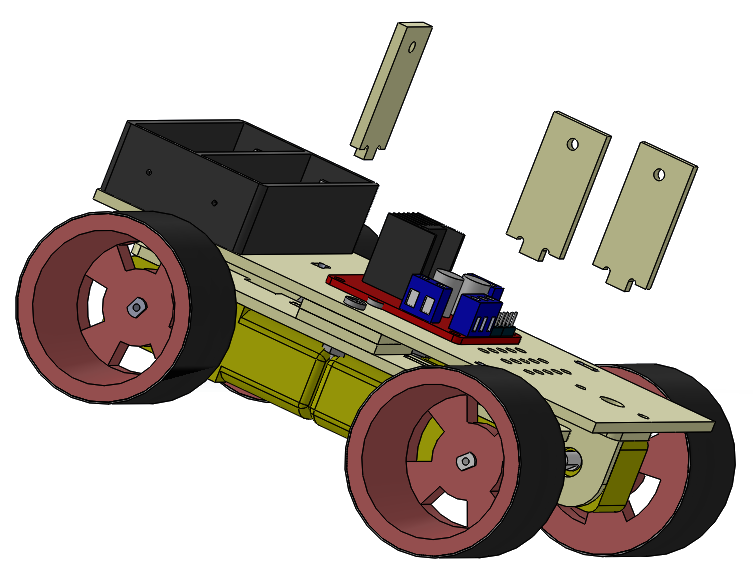
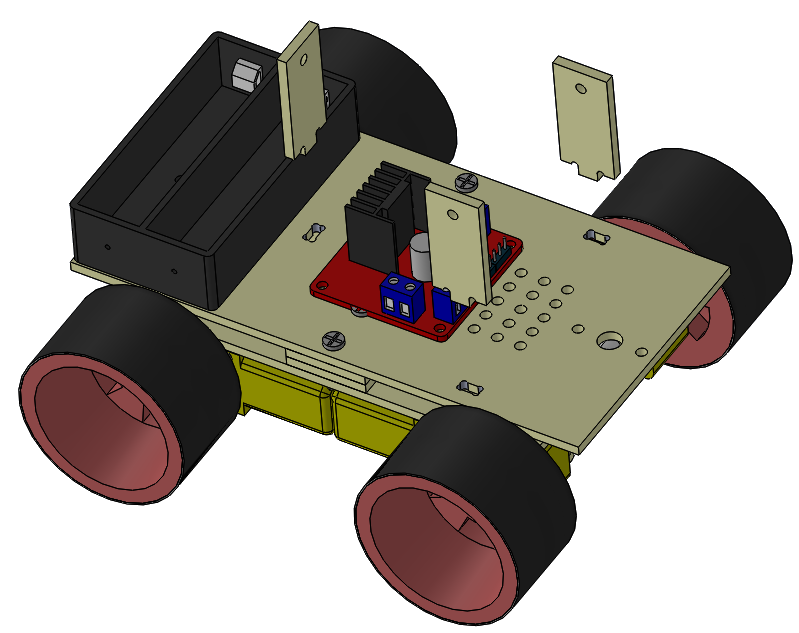
Верхняя часть корпуса крепится к нижней посредством трех винтов.
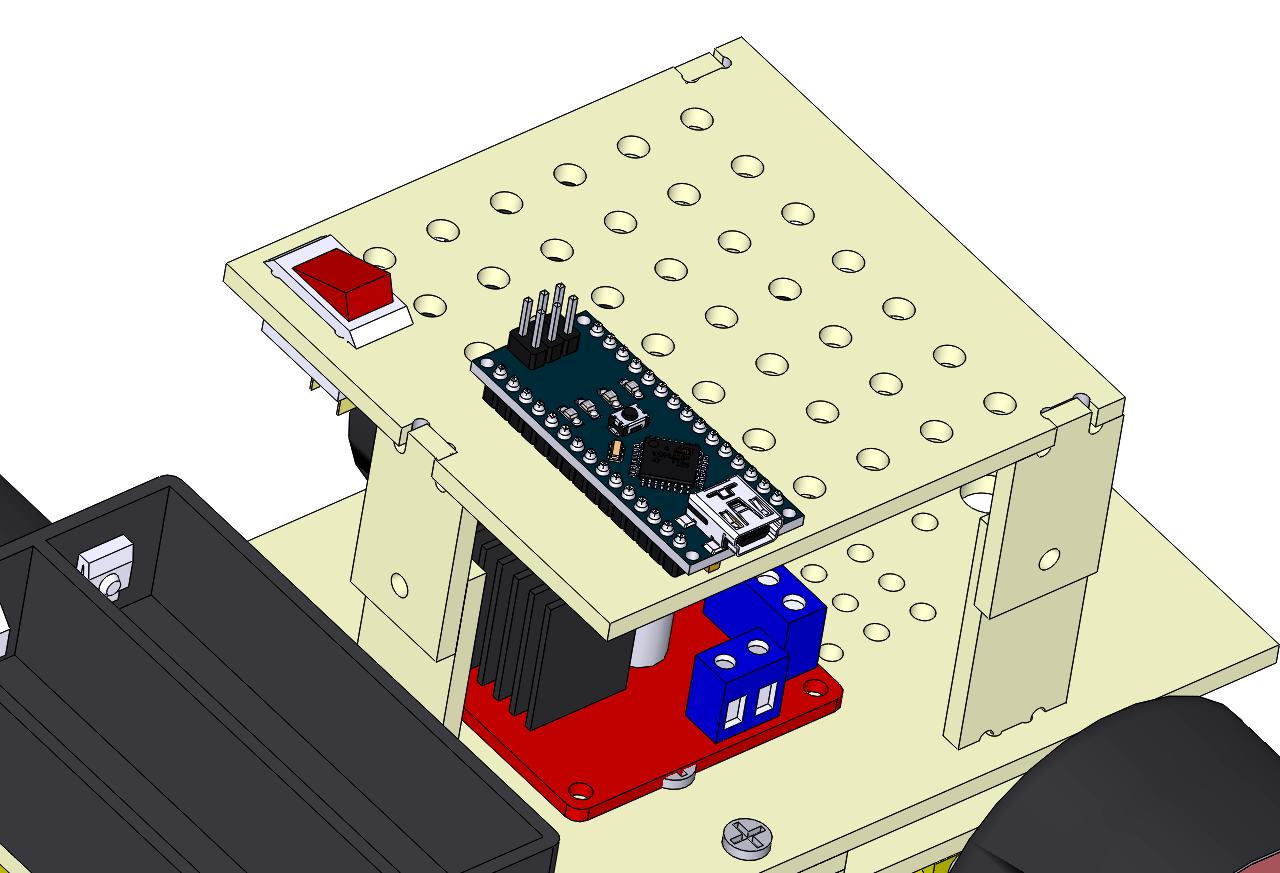
В соответсвующее по размеру отверстие устанавливаем выключатель электропитания робота от аккумуляторов.
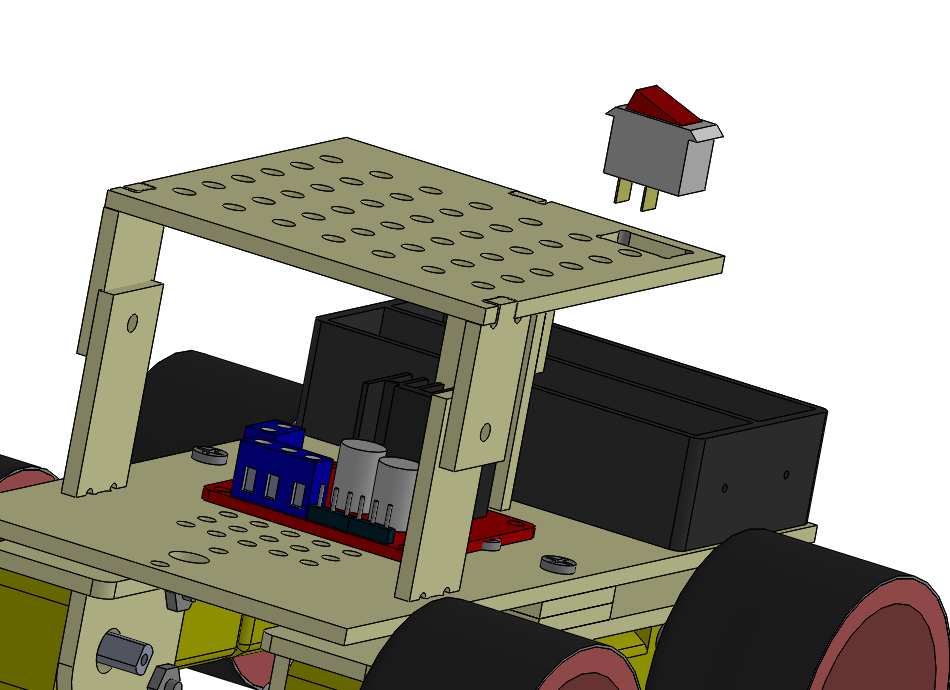
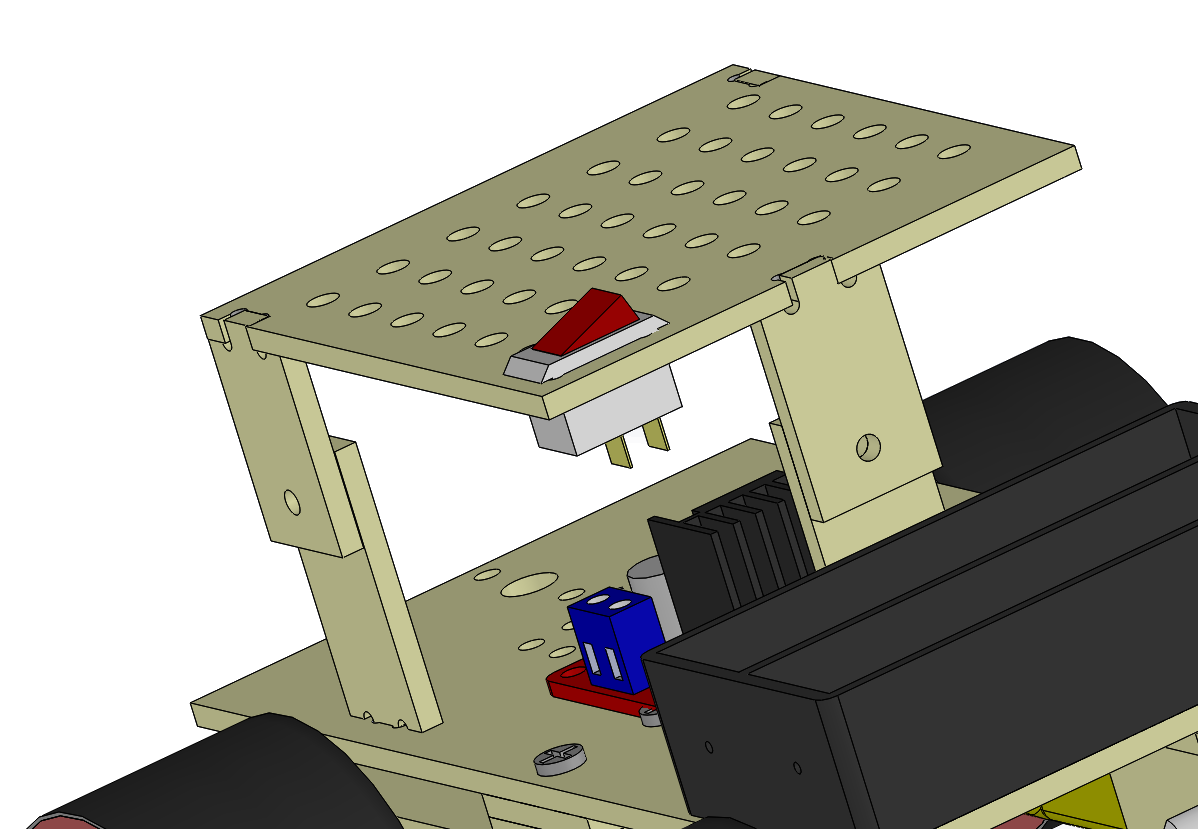
Кроме выключателя на верху корпуса будет установлен микроконтроллер Arduino NANO.
....
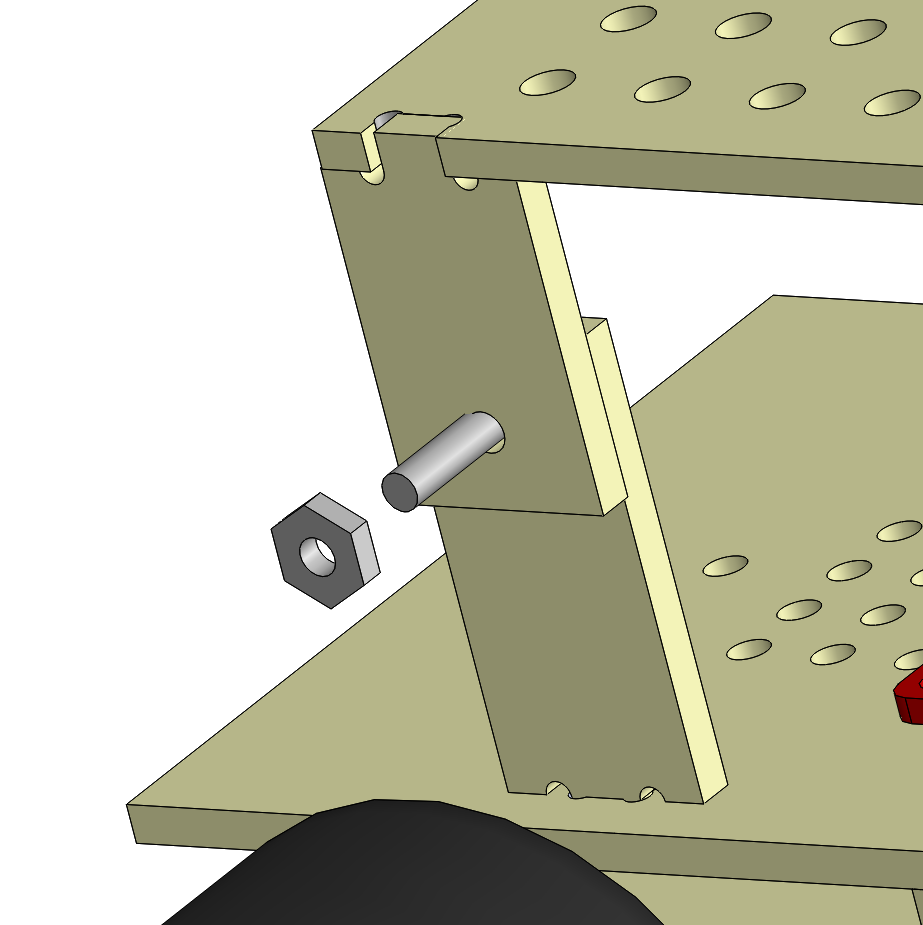
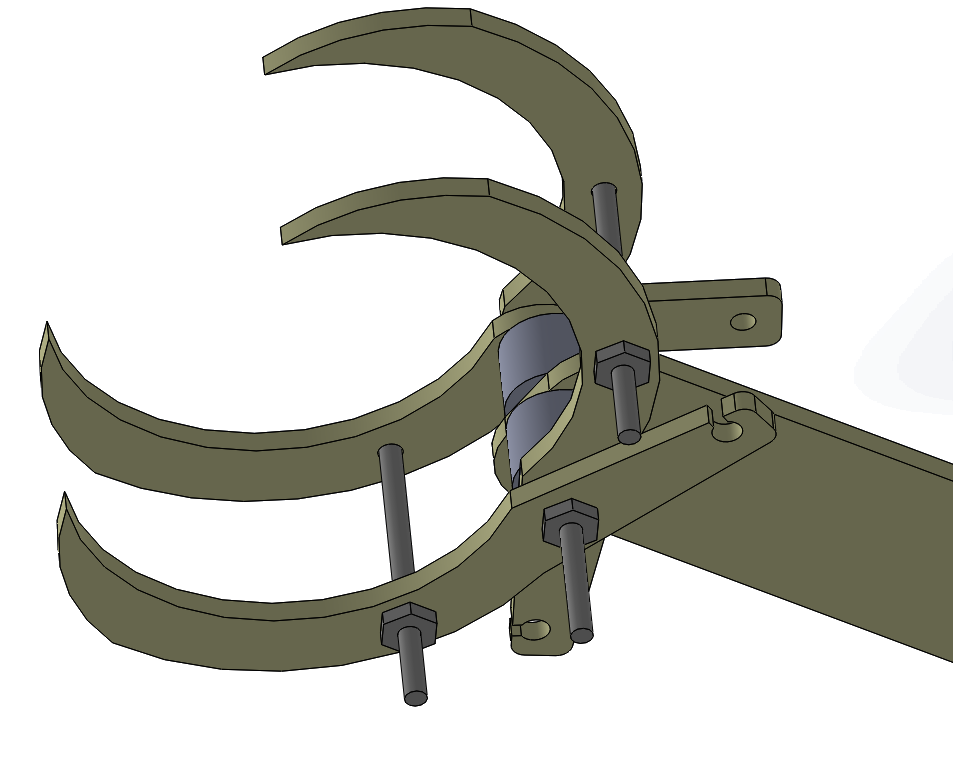
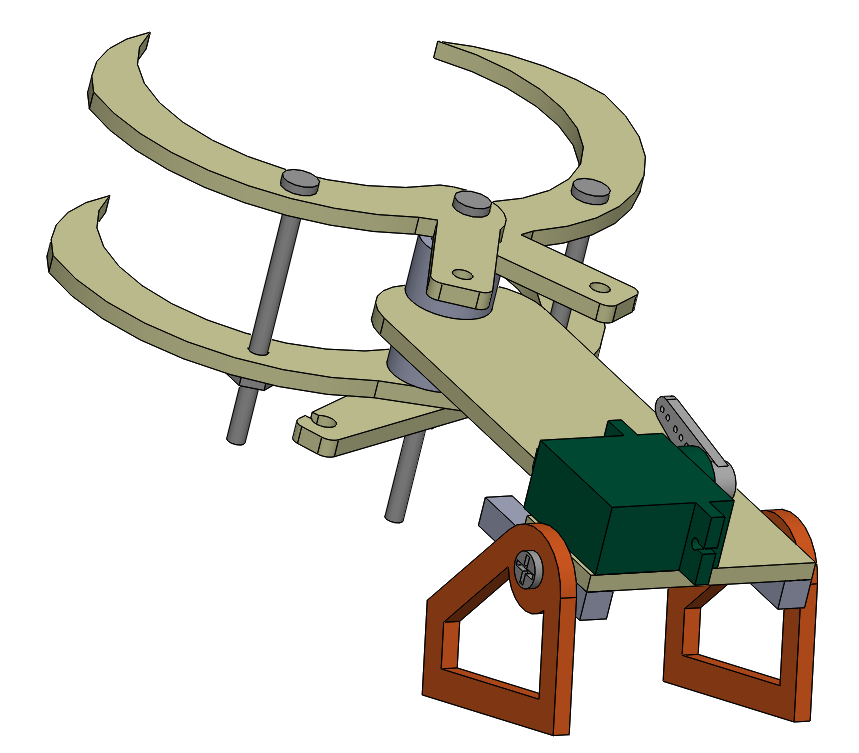
Пора собирать манипулятор. К винтам следует добавить шайбы, они не изображены на рисунках.
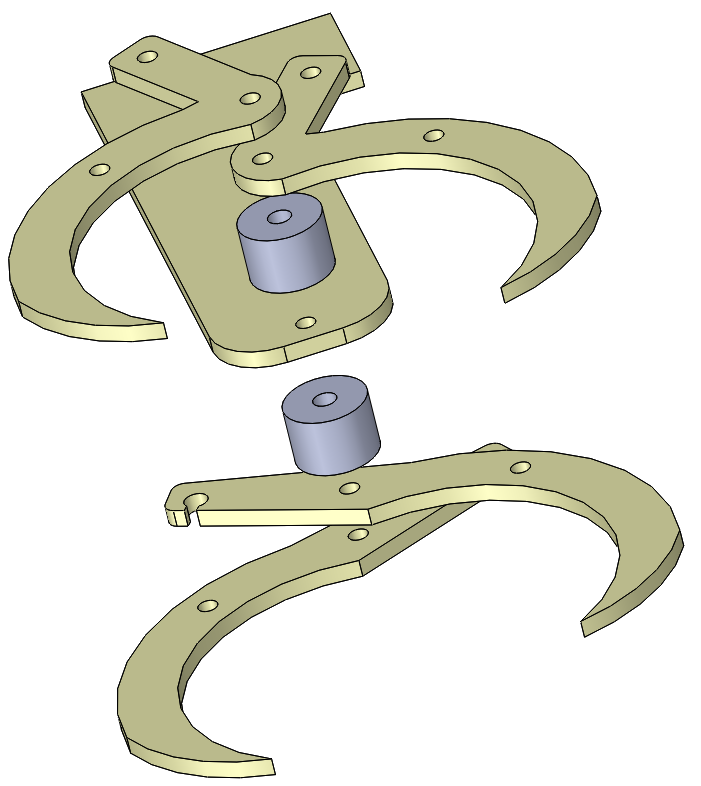
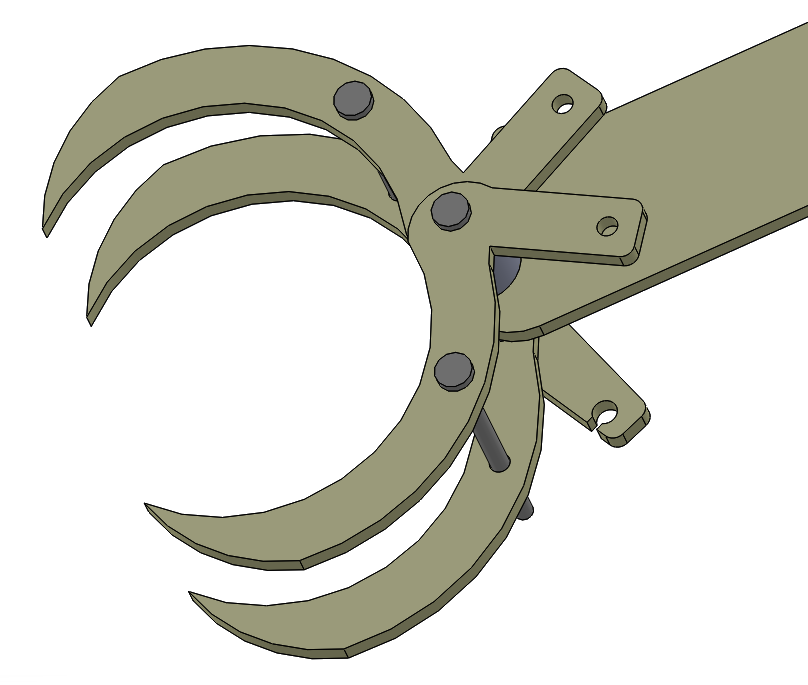
Под гайки следует установить шайбы и контгайки, вместо контргаек можно заблокировать возможность вращения гаек при помощи лака или быстросошнущего клея капнув его в место соприкосновения резьбы гайки и резьбы винта.
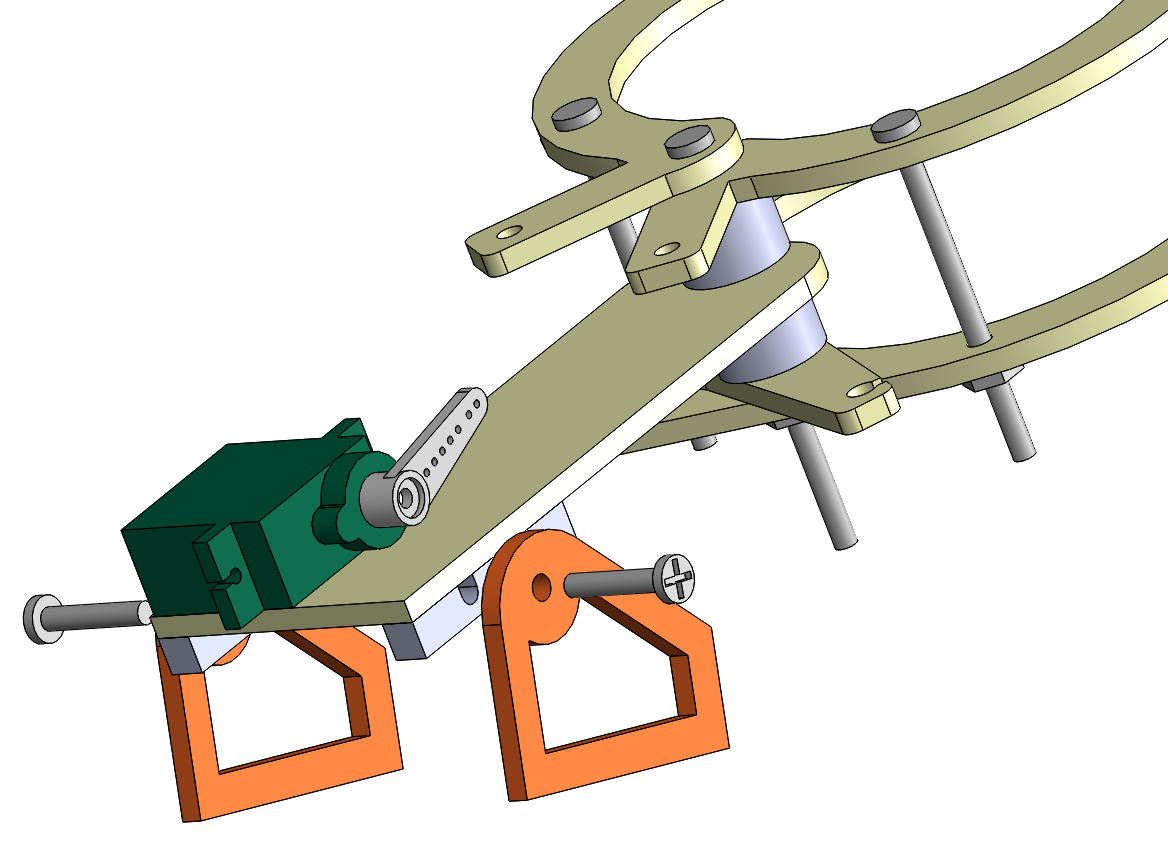
Сервомотор приклеиваем на термоклей, а что-бы он лучше держался, склеиваемую поверхность мотора зачищаем крупной наждачной бумагой.
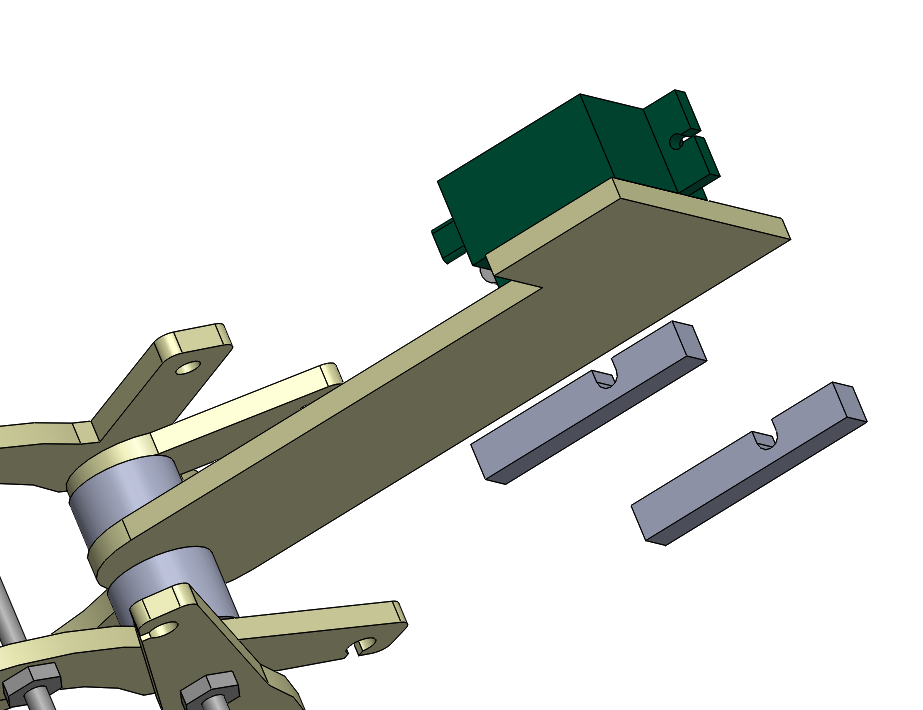
Снизу к подъемному рычагу манипулятора приклеиваем детали с отверстием под винты качалки.
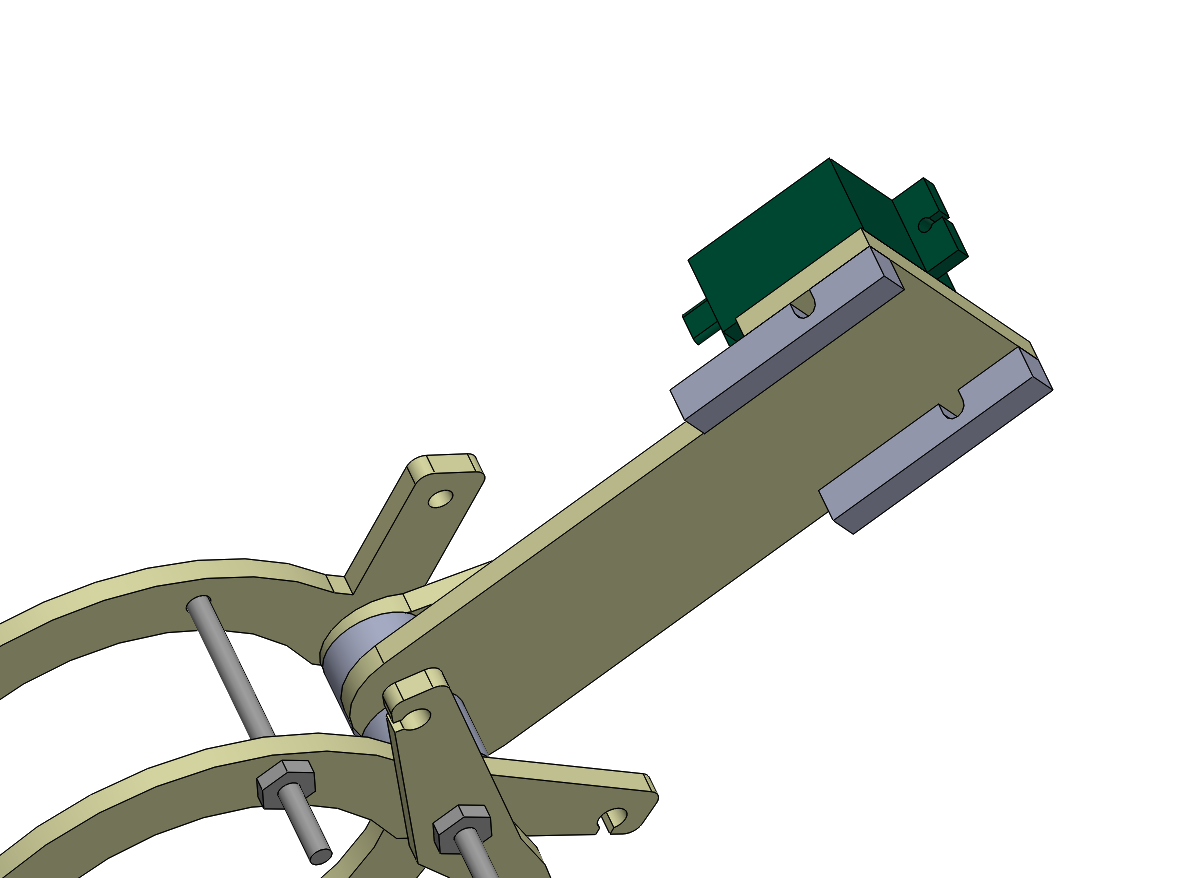
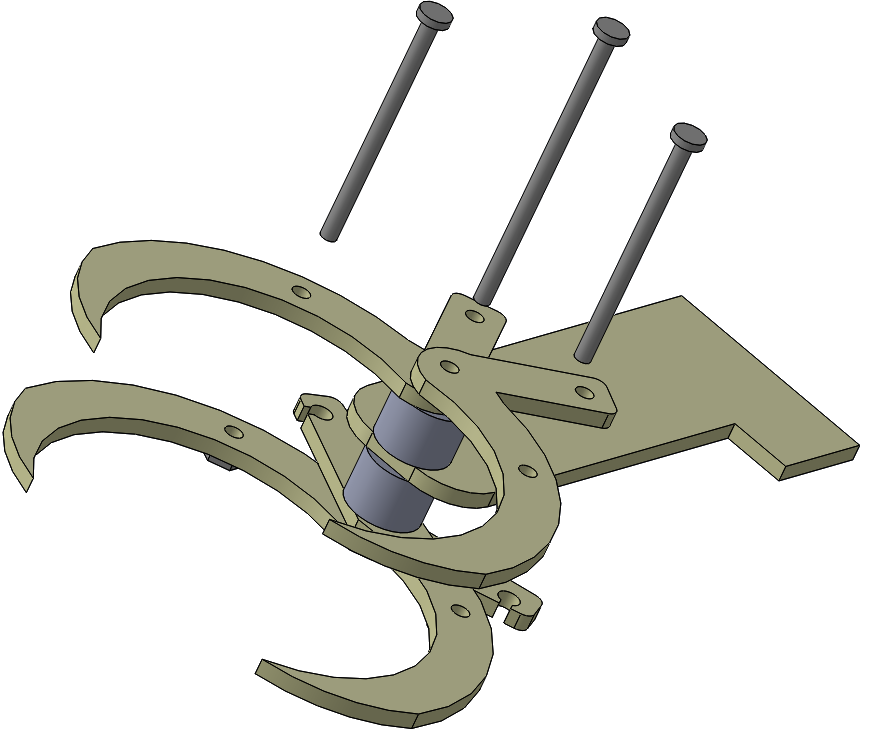
Устанавливаем качалки, а чтобы винты не выпадали, их концы, которые выступают на подемном рычаге подклиеваем к рычагу термоклеем, при этом следкет действовать аккуратно, иначе можно приклеить качалки и рычаг не будет подниматься.
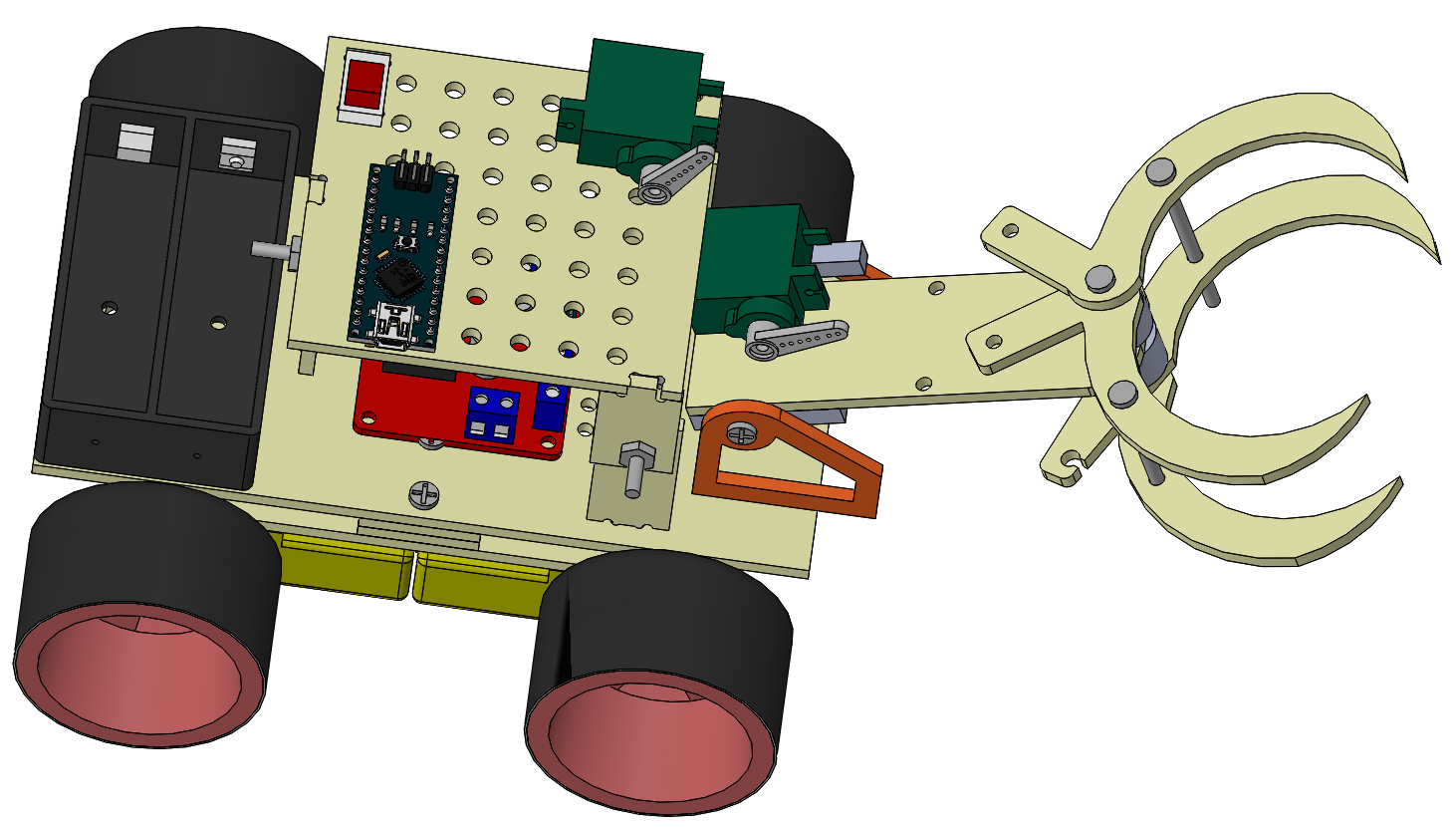
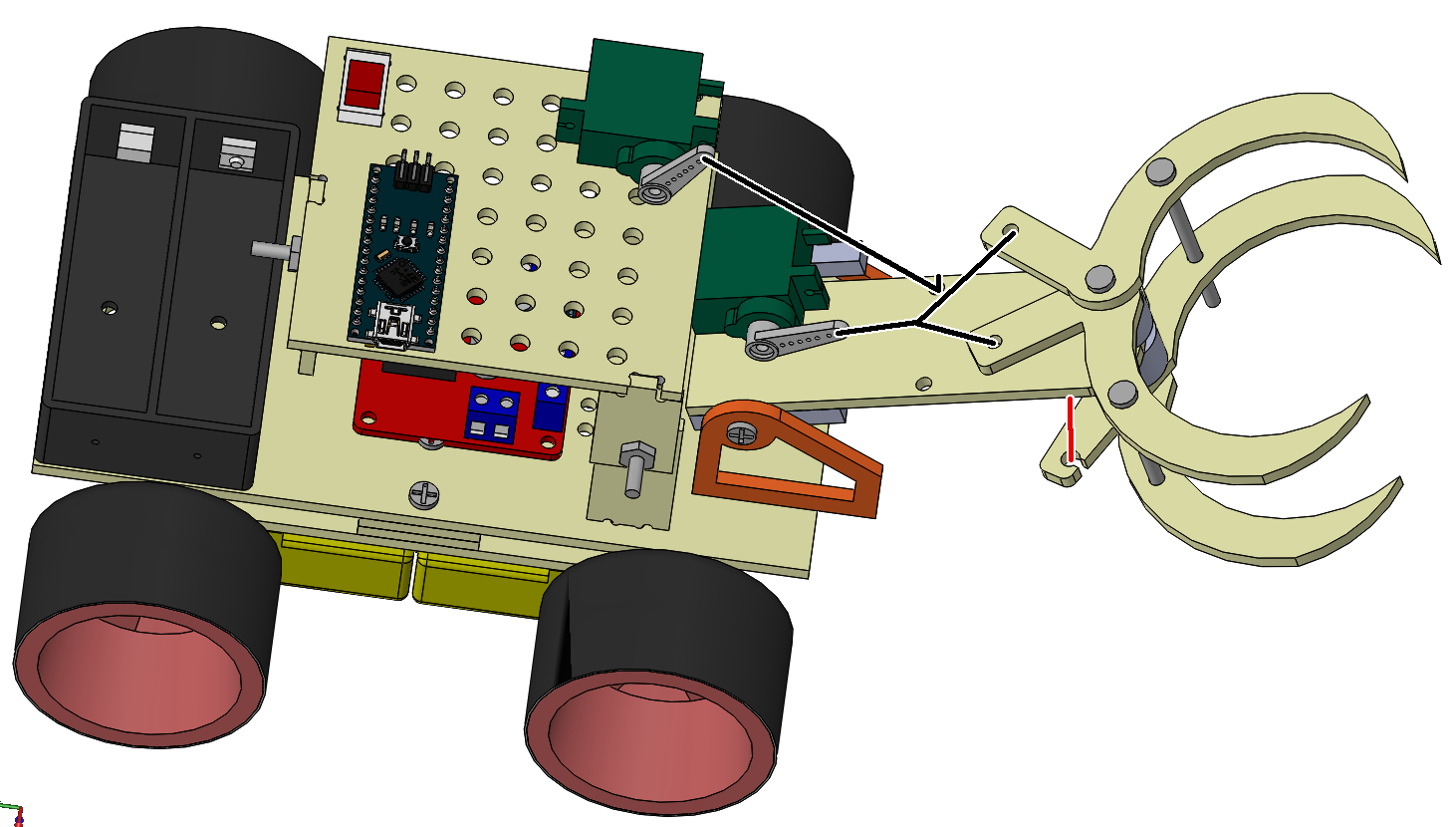
Теперь манипулятор готов к установке на робота.
Прицеливаемся, ставим качалки на робота, добиваемся, тобы рычагу ничто не мешало подниматься, отмечаем места будущего склеивания.
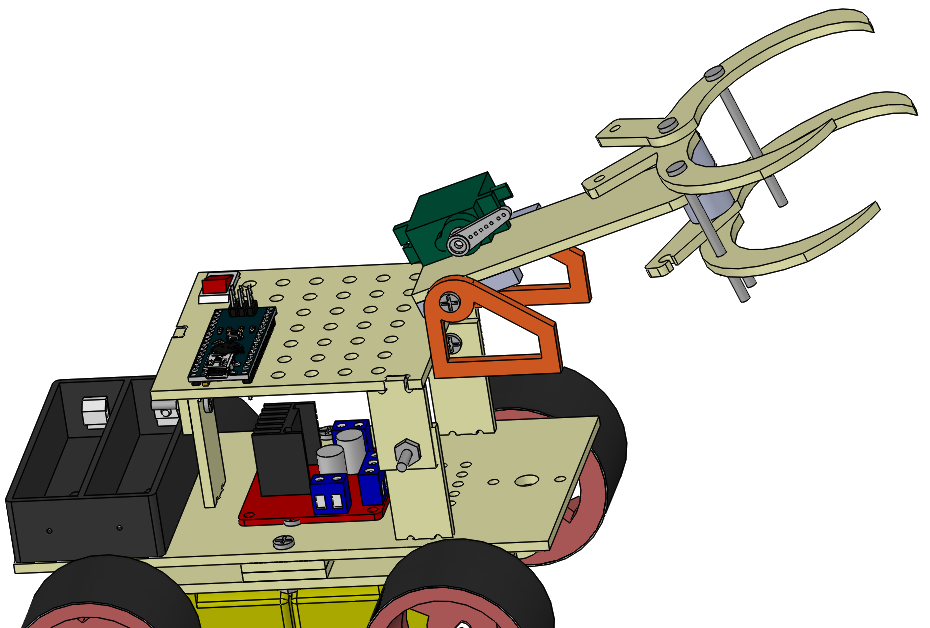
Наносим на отмеченные места робота клей и устанавливаем манипулятор. Ждем, когда клей затвередеет.
Далее примериваем второй сервомотор для установки н робота, зачищаем его нижнюю часть, наносим термоклей и аккуратно придавливаем мотор, излишки клея следует убрать, иначе он может помешать движению серворычажка.
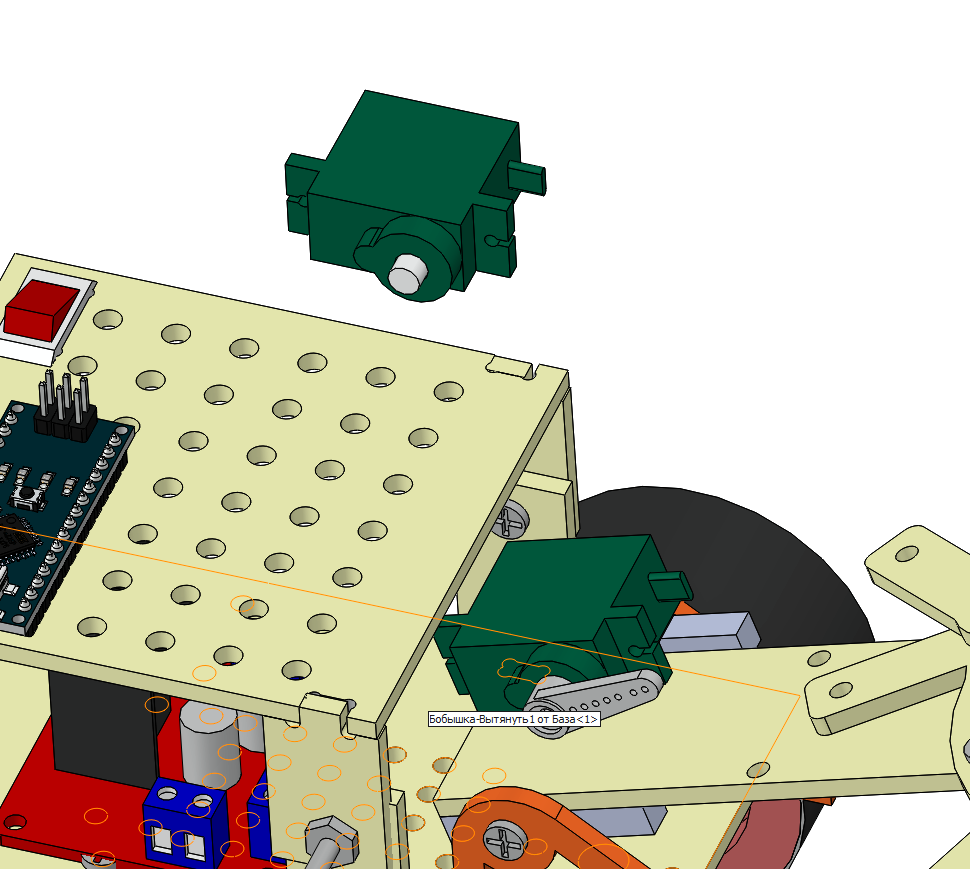
Правильная установка подъемного сервомотра изображена на следующем рисунке. Проверьте, чтобы рычажок не встречал припятствия во всех вариантах своего движения.
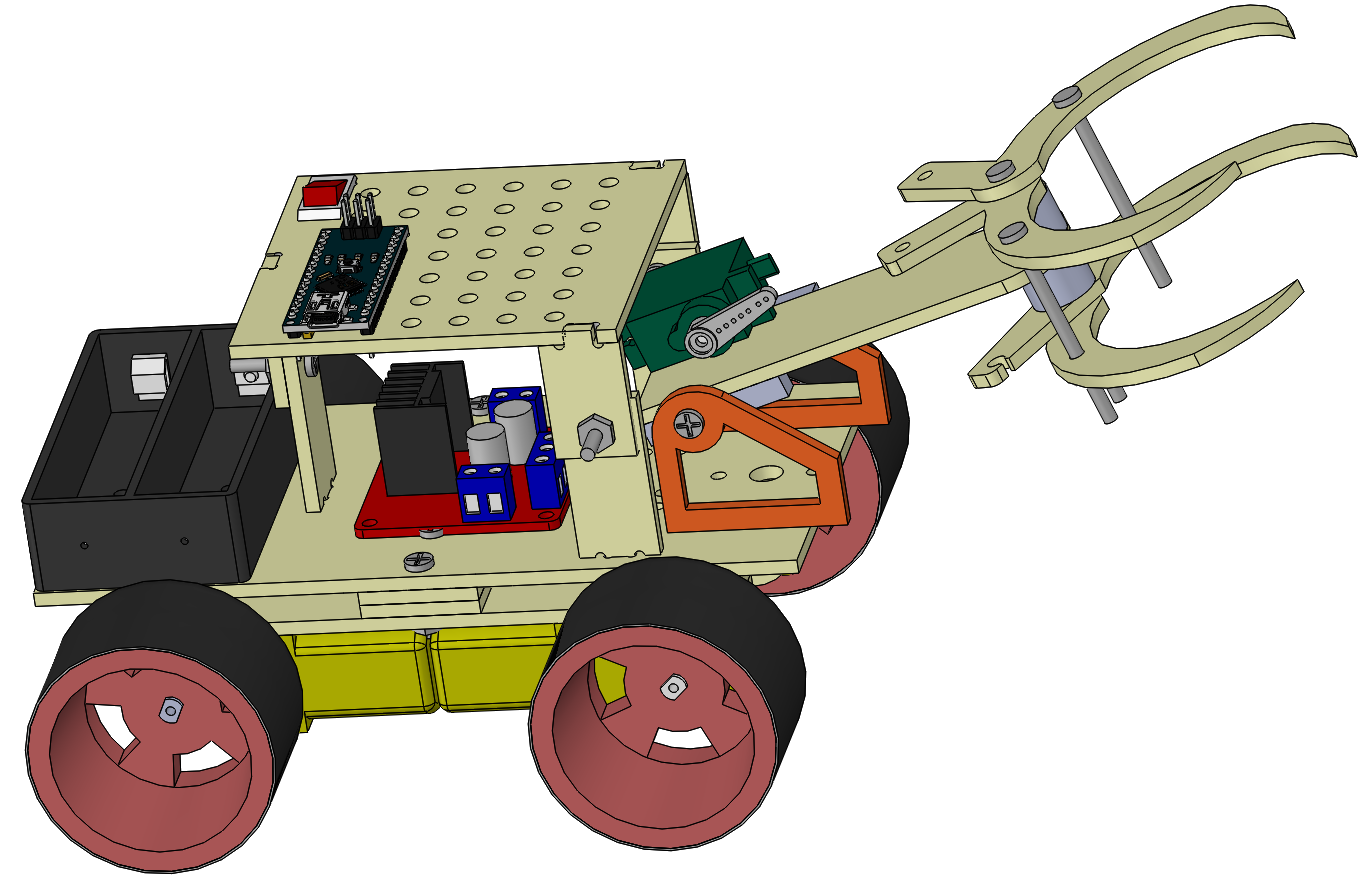
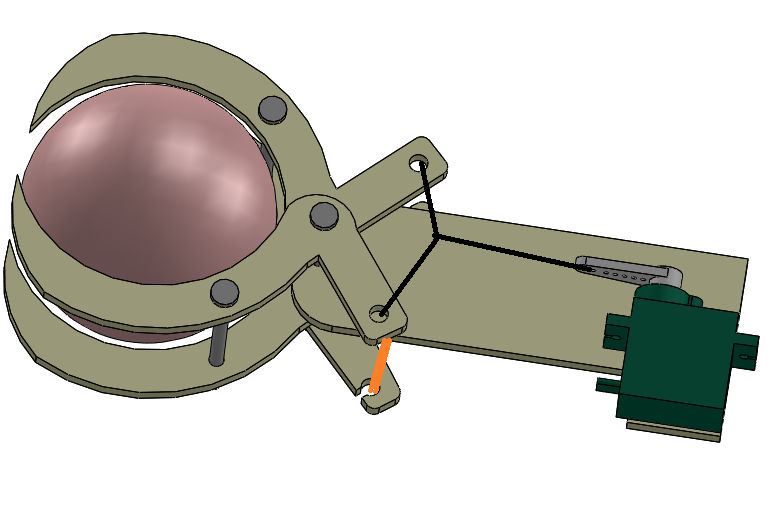
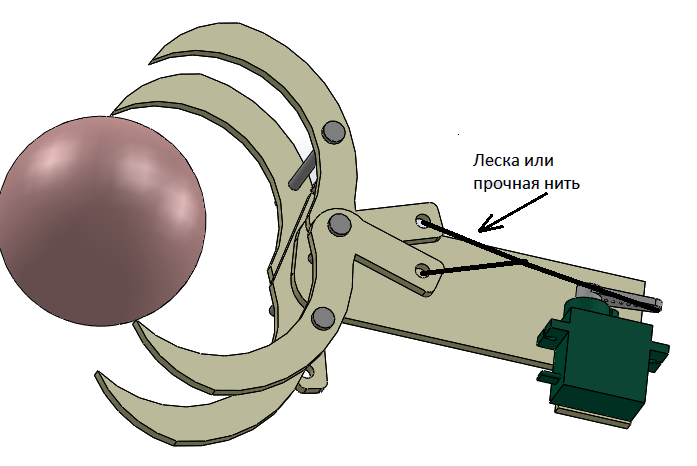
На следующем этапе нам потребуется прочная нить и канцелярская (банковская) резинка (продаются в канцелярких магазинах).
Нить растягиваем между верхними пальцами так, чтобы в растянутом состоянии нити пальцы манипулятора были сомкнуты. От центра нити к рычажку сервомотора также протыгиваем нить (нить не должна ездить). Когда рычажек в ближнем положении пальцы сомкнуты. Проверьте, чтобы рычажок не встречал припятствия во всех вариантах своего движения.
Нижние пальцы манипулятора имеют выемку для натягивания резинки, натягиваем в них резинку таким образом, чтобы кисть замыкалась и могла удерживать легкий мячик.
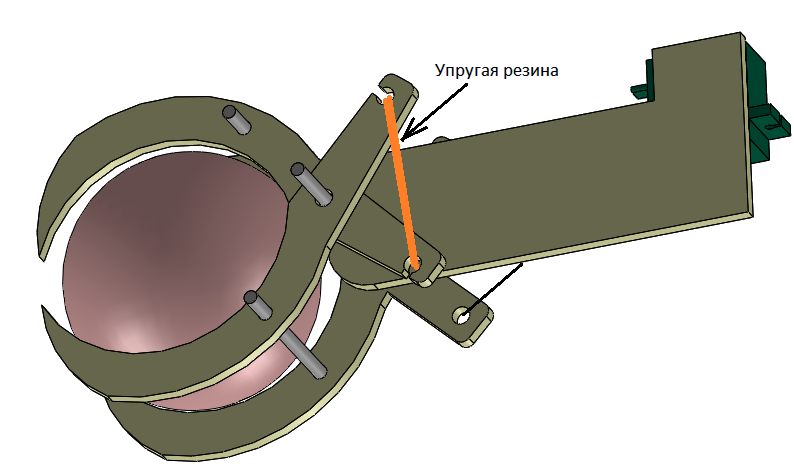
Когда рычажек в дальнем положении рука открыта.
По аналогии натягиваем нить на подъемный сервомотор.
Теперь можно соединить всю электронику и протестировать робота программно.

Ссылки
ОСТАВИТЬ КОММЕНТАРИЙ
Форма авторизации
ВОЙТИ С ПОМОЩЬЮ:
ИЛИ Авторизация на сайте: