
X
Робот баскетболист, сборка электроники
Ссылки
Сборку электроники робота начнем с подготовки мотор-редукторов.
Потребуются 4 керамических конденсатора емкостью 100нФ (104), гибкий многожильный провод сечением 0.2-0.5мм. .
Клеммы мотор-редукторов следует зачистить и залудить, провода нарезать (2шт по 15см, 2шт по 4см) зачистить кончики проводов и залудить, залудить ножки конденсаторов. Припаять конденсаторы и провода к клеммам мотор-редукторов, два длинных провода и конденсатор к одному и два коротких провода и конденсатор к другому.

Теперь короткие провода следует перекрестить и припаять к клеммам второго мотор-редуктора.
Проделать подобную операцию со второй парой моторов.
Теперь пары моторов следует проверить сначала на отсутствие короткого замыкания (мультиметром), а затем подключив к электропитанию, если оба двигателя в паре вращаются и вращение ротора в одну сторону, значит все собрано верно, в противном случае ищем ощибку - или непропай или соединение проводов неверное.

До установки на робота верхнего уровня следует:
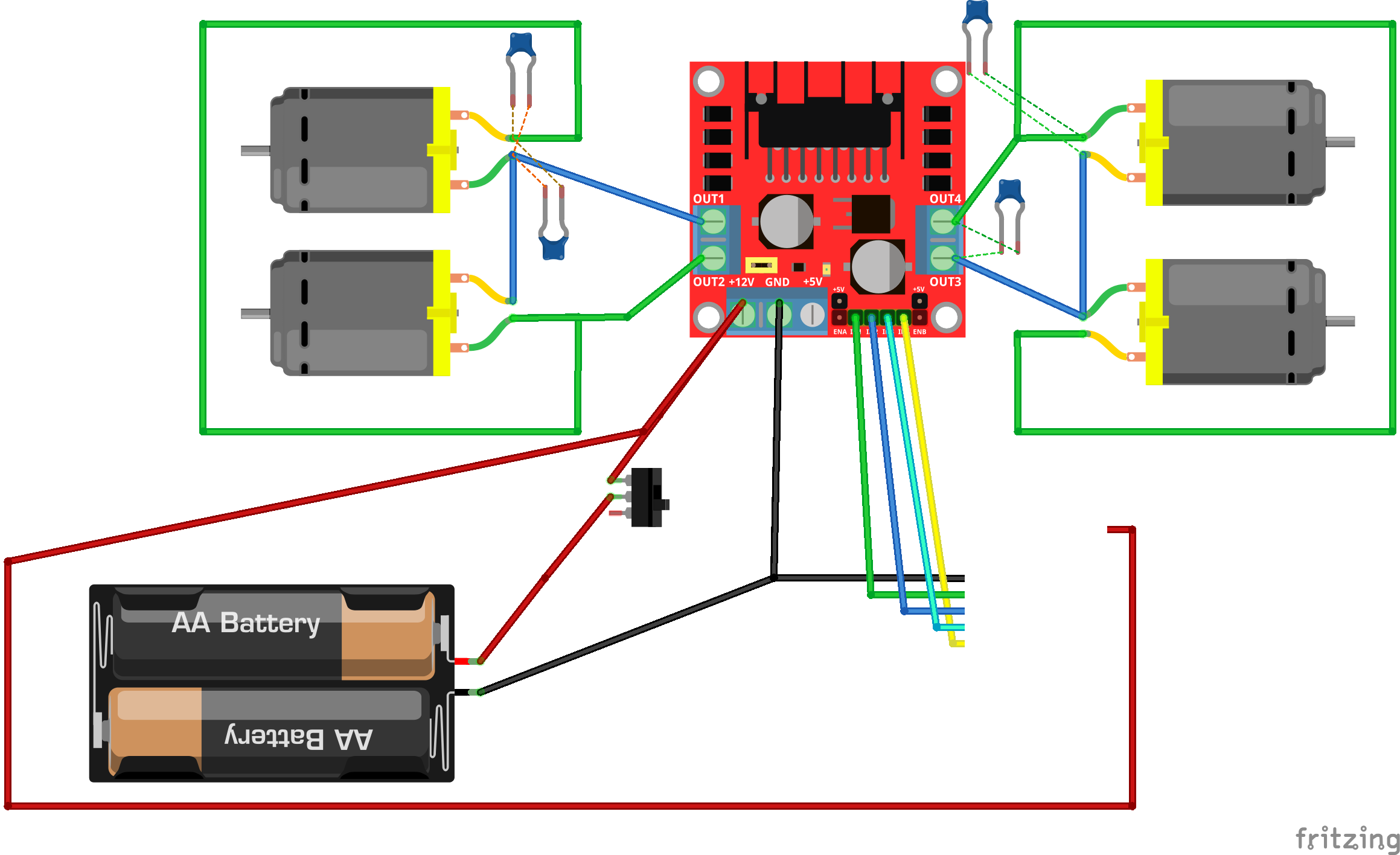
- Подключить провода от мотор-редукторов в соответвующие клеммы драйвера моторов (они затягиваются винтом);
- Три красных провода, каждый длиной около 10см, подлючить к разъему +12v драйвера моторов;
- Черный провод от (-) контакта бокса батареи и три черных провода каждый длинной около 10см подлючить к разъему GND драйвера моторов;
- Желтый провод длинной около 10см пустить от клеммы +5v драйвера (это питание Bluetooth адаптера);
- Подпаять или посадить на разъемы 4 провода на контакты драйвера IN1, IN2, IN3, IN4, они в дальнейшем пойдут на схему правления драйвером.
После установки верхнего уровня робота и установки выключателя следует подпаять один из красных проводов идущих от +12v драйвера к одной клемме выключателя, а красный провод идущий от положительного контакта бокса питания к другой клемме выключателя.
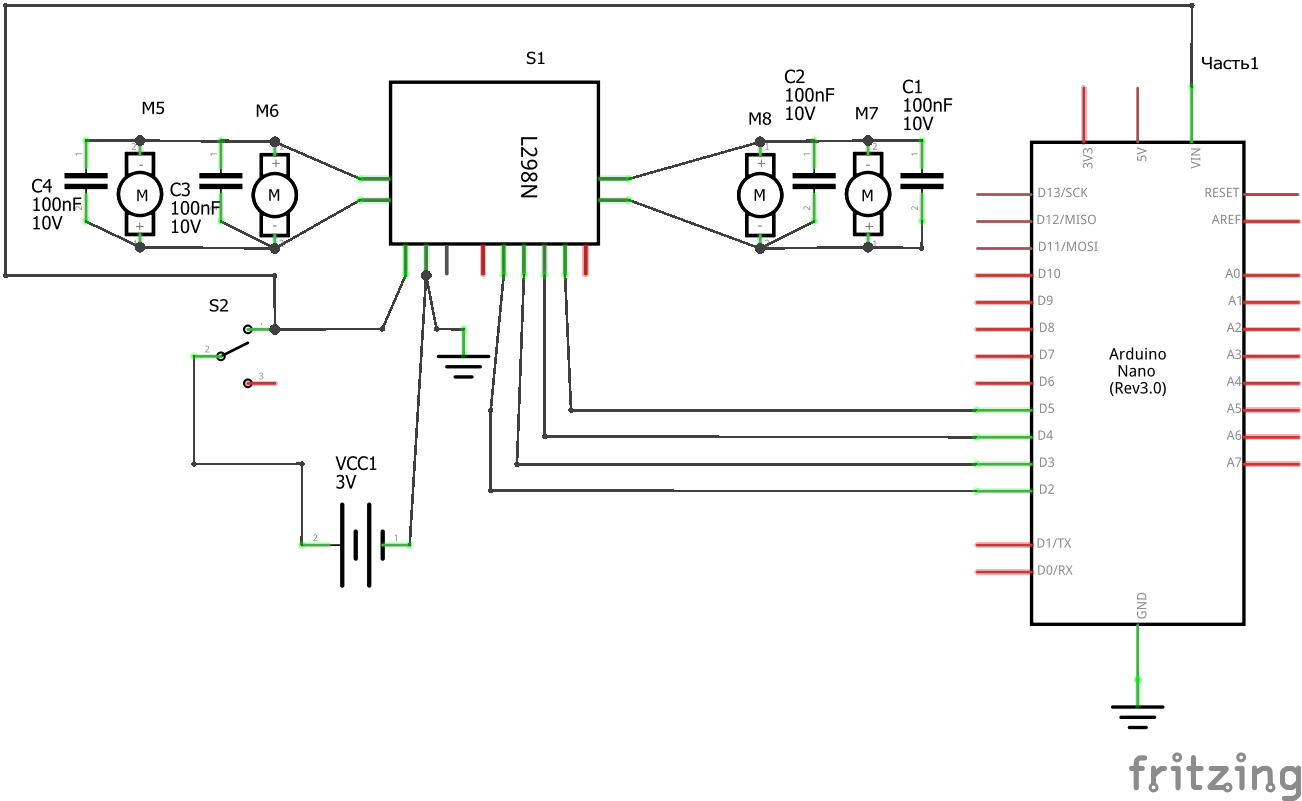
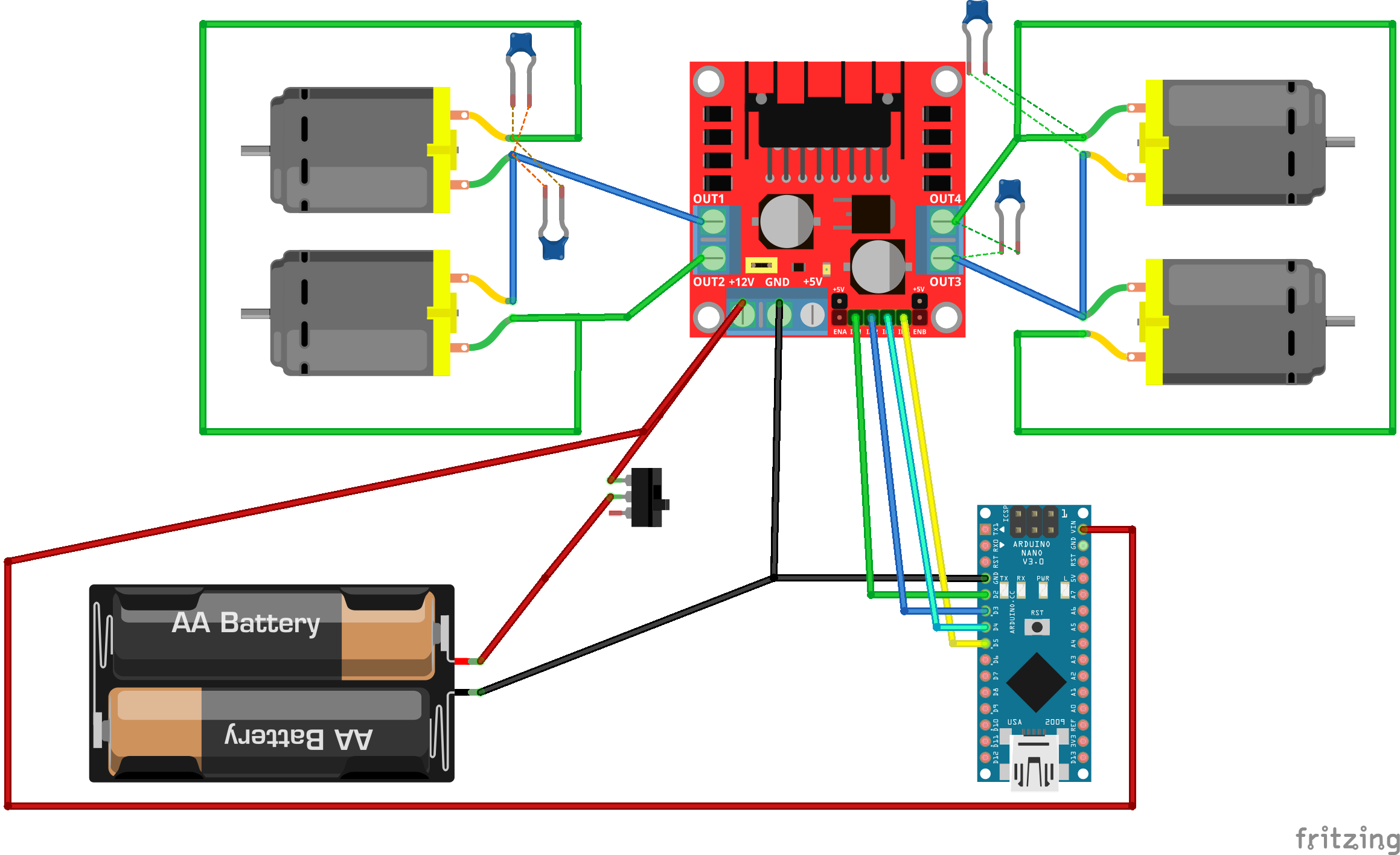
- Теперь провода, которые мы подключили к разъемам EN1-EN4, нужно подпаять к пинам Arduino D2-D5 соответственно;
- Один из свободных красных проводов от +12v драйвера подключить к VCC ардуино;
- Один из свободных черных проводов от +GND драйвера подключить к GND ардуино.
Робота можно протестировать установив на него несложную программу неуправляемого движения.
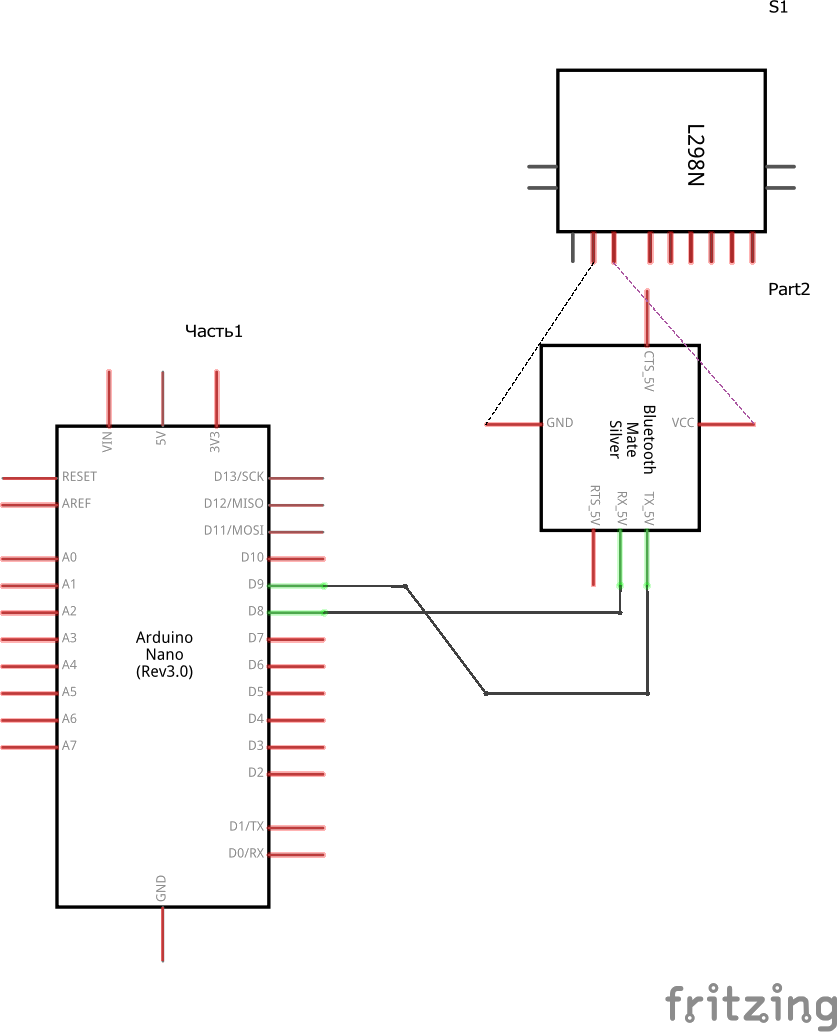
Подключим модуль дистанционного управления по Bluetooth:
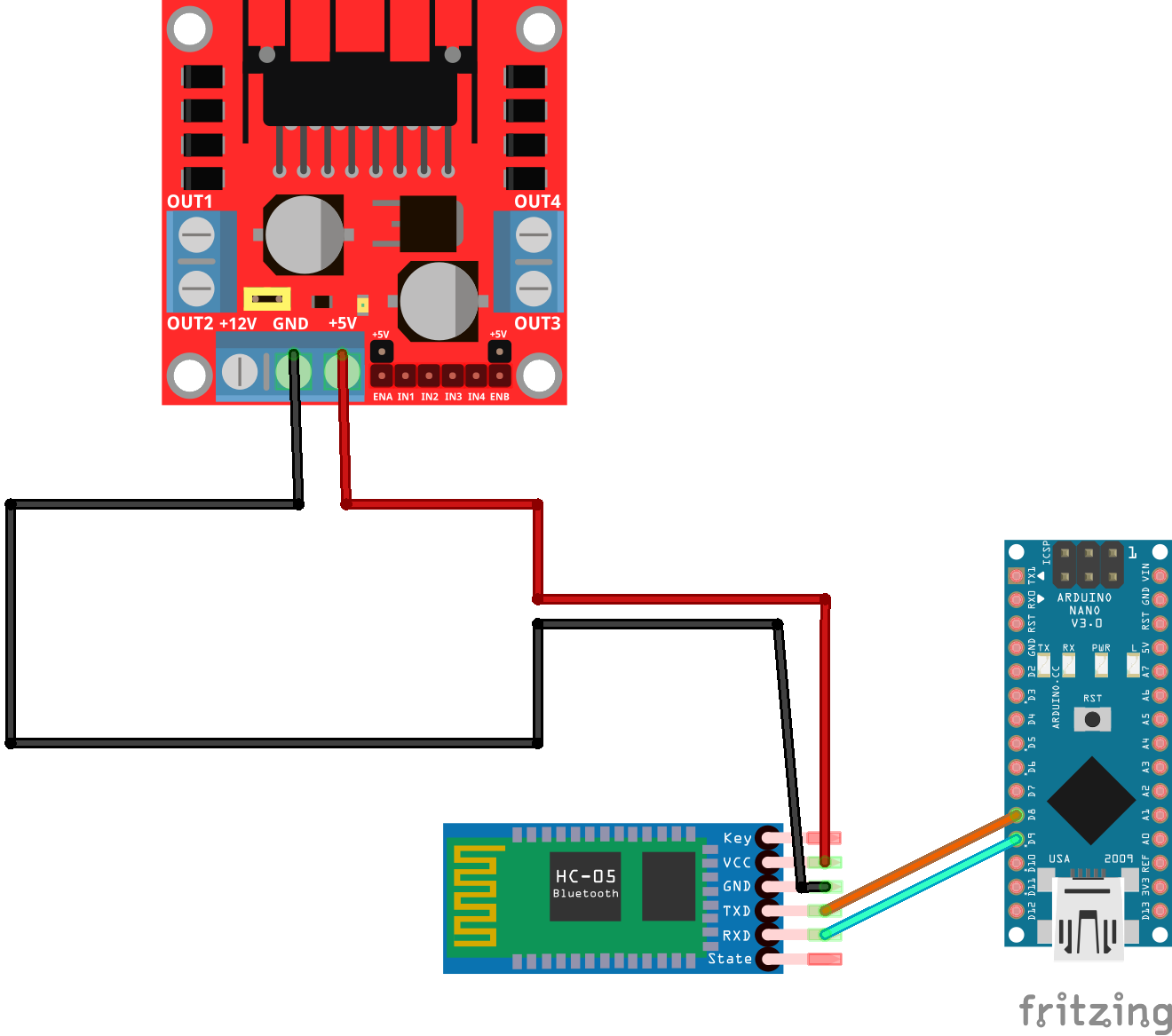
- Один из свободных черных проводов от +GND драйвера подключить к GND Bluetooth адаптера;
- Желтый провод, который мы ранее подключили к +5v драйвера подключить к разъему VCC (+5V) Bluetooth адаптера;
- Черный провод от (-) контакта бокса батареи и три черных провода каждый длинной около 10см подлючить к разъему GND драйвера моторов;
- TX Bluetooth адаптера к D8 Arduino;
- RX Bluetooth адаптера к D9 Arduino.
Теперь можно протестировать управление роботом по Bluetooth.
Прежде чем начать сборку манипулятора нужно подобрать пару сервомоторчиков. Один будет разжимать захват, а второй поднимать и опускать манипулятор.
Если применять миниатюрный сервомотор, то стоит отдать предпочтение мотору с металлическим редуктором.

Для сервомоторов покрупнее металлический редуктор не обязателен.

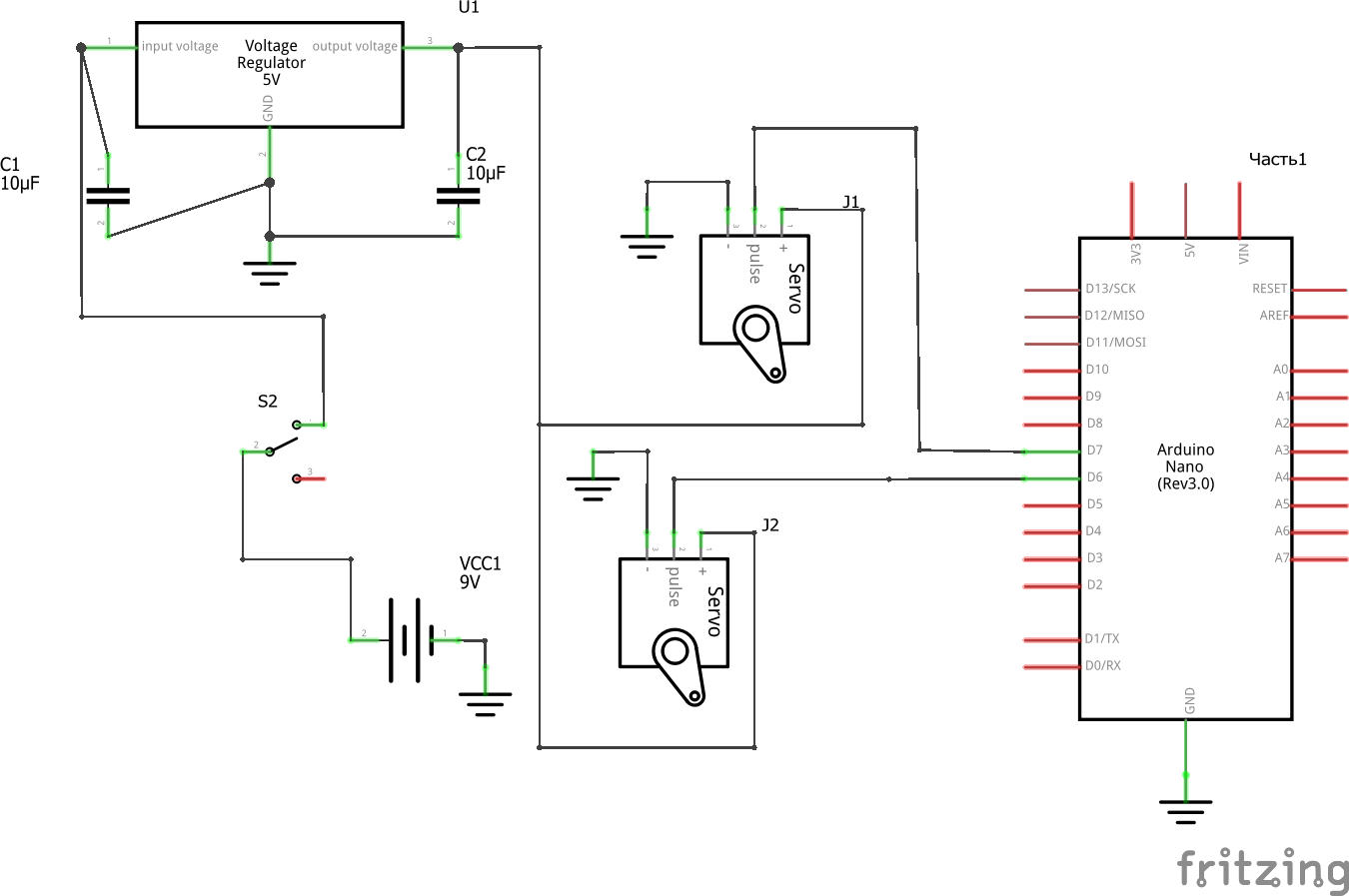
Если вы (как и я) предпочитаете пайку то клеммы сервомоторов придется отрезать. Красный провод прииватся к +5вольт, черный(или коричневый) к GND, желтый или оранжевый информационный, через него сервомотор будет получать управляющие сигналы от Arduino. Сервомоторы запитываем от отдельного стабилизатора (у нас еще есть незадействованные провода один красный от клеммы +12v драйвера и один черный GND). стабилизатор собираем на основе L7805 и двух кондесаторов или берем готовый импульсный стабилизатор на основе LM2596, настроив его на выходное напряжение 5вольт. Не путаем + и -!
Сервомотор управляющий пальцами подключем на управление к D6, подъемный сервомотор к D7.
Тестируем, исправляем ошибки...
Для управления можно использовать программу RC Car из Android market, ее потребуется установить на смартфон, а смартфон подружить с роботом. По умолчанию его имя будет HC-05 или HC-06.
Ссылки