
X
Беспроводная система симуляции на ПК для тренировки полетов на коптере
Рассмотрим беспроводную систему симуляции полетов на коптере для персонального компьютера, но для начала введение в тему.
Коптеры устройства дорогие, а полеты на них без навыков нередко заканчиваются падением. Поэтому качественная система симуляции полетов поможет сохранить коптер и научит начинающего пилота управлению на сложном устройстве.
Речь конечно пойдет о FPV квадрокоптерах, которые управляются удаленно с аппаратуры управления и имеют на борту КУРСОВУЮ камеру и передатчик видеоизображения (у пилота должен быть приемник видеоизображения и экран для визуализации изображения в реальном времени).
Состав FPV коптера
Стандартно FPV коптер состоит из следующих частей:
- Управляющий контроллер. Это контроллер в котором содержится программа управления полетом. На одной плате с данным контроллером должен быть гироскоп и акселерометр, иногда барометр и электронный компас, но они нам пока не требуются. Еще контроллер может управлять микросхемой добавления в видеосигнал служебной информации OSD (система наложения данных), например, вы сможете на экране с картиной полета видеть где-нибудь в углу информацию по заряду батареи (это очень важно!). Сделать-спаять управляющий контроллер не сложно, сложно сделать его максимально легким и конечно, будут сложности, если вы захотите самостоятельно его запрограммировать, я не говорю, что это не возможно, но и не совсем просто.
- Драйверы бесколлекторных моторов - регуляторы оборотов, electronic speed controller (ESC), они управляют скоростью и мощностью вращения винтов коптера. ESC бывают раздельные - для каждого мотора, бывают совмещенные 4 в 1, а бывают встроенные в плату управления (в основном это делается там, где нужен минимальный вес!). ESC состоят из силовых транзисторов непосредственно управляющих моторами и платы управления транзисторами.
- Курсовая камера. Это жестко-неподвижно установленная камера, она направлена вперед с подьемом на 20-45градусов (зависит от крейсерской скорости коптера, чем выше скорость, тем больше наклонео коптер вперед, тем больше требуется наклон камеры для совпадения с курсом полета). Курсоавая камера должна иметь широкий угол обзора 120 и более градусов, это позволяет ухватить больше объектов окружения в кадр, а это важно при совершении маневров. Как правило это аналоговая камера, передающая видеоизображение в формате PAL или NTFS. Сигнал с камеры должен быть передан в "эфир" для этого служит видеопередатчик VTX.
- Видеопередатчик VTX работает/передает изображение на частоте выбранной в разрешенном диапазоне 5.8G (бывают и другие частоты). Как правило в VTX забита разрешенная сетка частот, между которыми можно переключаться либо кнопками на VTX, либо командами с полетного контроллера. Видеопередатчики отличаются мощностью 25мВт до 1600мВт и более. Для полетов на 300метров (по моему опыту) достаточно 25мВт, но 200мВт улучшит качество картинки в ваших очках за счет уменьшения количества помех, более высокая мощность требуется для дальнолетов. Нередко хорошая антена улучшит сигнал и без увеличения мощности видеопередатчика.
- Приемник команд аппаратуры управления. Служит для получения дроном команд от аппаратуры управления, для этого имеет радиоприемный канал и 1-2 приемные антенны. Приемник должен соответствовать аппаратуре управления, например, если у вас аппаратура FlySky, то приемник должен поддерживать протокол AFHDS или AFHDS2A. Но есть и мультипротокольные аппаратуры, которые могут управлять приемниками от разных производителей.Современный приемник соединяется с контроллером полета по последовательному соединению и передает команды по цифровому прротоколу IBUS или SBUS. Мы будем рассматривать протокол IBUS, но SBUS принципиальных отличий не имеет.
- Рама дрона. На сегодня карбоновые рамы стали достаточно дешевы, они обладают малым весом и высокой жесткостью, что и требуется. Существует множество конструкций, но в основе всех лежит крестообразное расположение моторов. Иногда в рамы добавляют элементы защиты для пропеллеров, это позволяет коптеру не потерять управление при несильном столкновении с препятствием.
- Моторы. Для дрона нужны легкие, мощные, долговечные моторы. Этим условиям в полной мере соответствуют бесколлекторные двигатели. Обмотки данных двигателей расположены на статоре, а на роторе по кругу приклеены магниты. Ротор вращается на шариковых подшипниках, что несомненно очень здорово. Подобные двигатели являются трехфазными и управляются довольно сложным устройством - драйвером/ESC.
- Пропеллеры. Моторы для дрона имеют разные характеристики по мощности и скорости вращения, это зависит от конструкции и особенностей намоки обмоток на статоре. Следственно есть различия и в том, какой пропеллер можно установить на какой мотор. Моторы имеют 3 характеристики: 1 количество лопастей 2-4, Размер/размах в дюймах, Шаг- расстояние, на которое провеллер ввинтится за оборот в упругой среде.Размер и другие характеристики подбираются под раму, вес коптера и его моторы, либо моторы подбираются под пропеллеры. Опытные пилоты производят подбор на основе опыта, но есть и специальные расчетные алгоритмы.
- Источник питания. Как правило это Li-po аккумулятор с высокой токоотдачей. Но для неспешных полетов можно использовать сборки из Li-Ion аккумуляторов, у них хуже токоотдача, но больше емкость.Для маленьких коптеров с массой до 100 грамм используются 2S-3S аккумуляторы (7.4 - 11.1в), с увеличением массы коптеров напряжение аккумуляторов как правило увеличивают, для больших гоночных коптеров это уже 6S (6 x 3.7V = 22.2V). Масса аккумулятора должна быть согласована с мощьностью моторов коптера, в противном случае коптер либо не взлетит, либо станет слабоуправляемым. Но если аккумулятор будет иметь малую емкость, то существенно сократиться полетное время, нужно соблюдать баланс, полетное время в 4-5 минут можно считать достаточным.
Методы управления FPV коптером.
Используются два основных метода/режима управления Angle и Acro.
- Angle - режим, в котором коптер самостоятельно удерживает горизонт, для этого применяется акселерометр - прибор измеряющий ускорения он применяется в паре с гироскопом. А так как сила тяготения, это сила той-же природы, то акселерометр возможно применять для определения угла склонения по отношению к горизонту. В этом режиме пилот стиками аппаратуры управления задает наклон коптера, что приводит к движению коптера в определенную сторону. Если отпустить все стики, то хорошо отбалансировный дрон зависнет на одном месте (как правило для этого дополнительно применяется GPS).
- Acro - режим, в котором пилот стиками управляет не наклоном коптера, а угловой скоростью поворота коптера по осям, в этом режиме используется только гироскоп для стабилизации угловой скорости. Если вы отпустите стики, то ваш коптер разобьется скорее всего. Полет в данном режиме требует полной концентрации внимания и постоянного реагирования на ситуации, подвороты подруливании, наклоны... Коптер самостоятельно не выравнивается, это делает пилот. Учиться летать в этом режиме сложно, но умение летать в нем дает огроммные преимущества, вы можете делать с дроном все, что захотите, крутить его как угодно!!! Но нужно научится, нужно, что-бы ваша нервная система получила (натренировала) навыки, которые позволяют пилоту не думать как нажимать стики, а делать это практически инстинктивно.
И вот мы подошли к сути данной статьи, как натренировать свою нервную систему недорого? (стоимость разбитого квадрокоптера или его частей хоть и не заоблочная, но ...). Как научится летать в Acro-режиме. Ответ, конечно, это хороший качественный симулятор. Симулятор, который максимально повторяет полетную обстановку.
В качестве программы симулятора я использую LiftOff, на нем неплохо набивать руку, в стиме он стоит не дорого, качество симуляции приличное.
https://store.steampowered.com/app/410340/Liftoff_FPV_Drone_Racing/
Но тренироваться нужно в приближеной среде: В FPV-очках/маски и с использованием аппаратуры управления дрона, тогда действительно все будет качественно. А вот настроить обстановку для тренировки мы сегодня и постараемся.
1. Подключение аппаратуры управления к компьютеру.
Большинство современных аппаратур управления уже имеет USB-интерфейс для подключения к ПК по протоколу стандартного джойстика. В этом случае вам потребуется соединить кабелем компьютер и аппаратуру управления. Убедиться, что у вас подключилось новое устройство и проверить правильность его работы.
Но это не со всеми аппаратурами удобно-возможно, немного ограничивает ваши движения. А ведь есть довольно простой способ подключения аппаратуры в стандартном для нее режиме - по радиоканалу.
Рассмотрим это на примере самой недорогой но функциональной аппаратуры FlySky FS-i6, но по факту будут поддерживаться все пульты имеющие в своем арсенале протокол от FlySky.
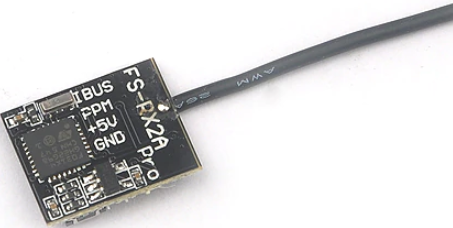
Потребуется самый простой - дешевый приемник для FlySky имеющий выход управления IBus (это последовательный протокол связи приемник-дрон).
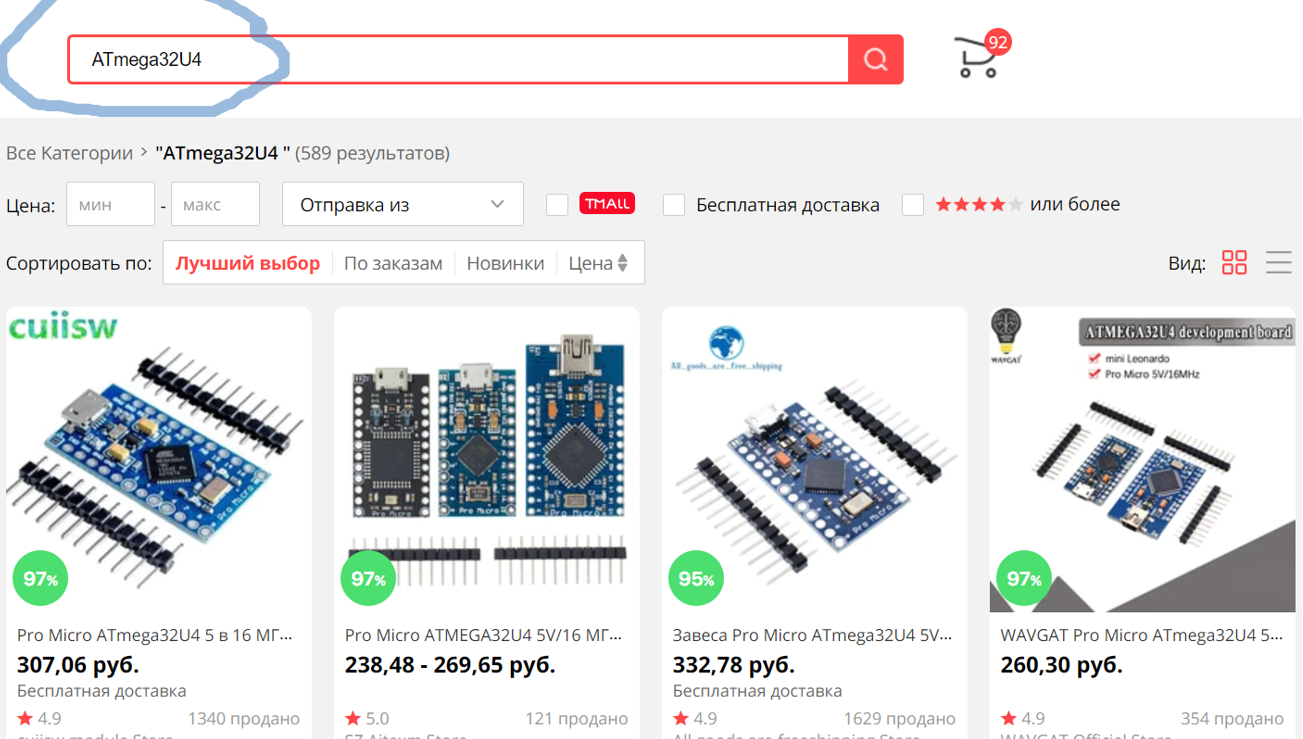
Также нам потребуется плата Arduino на чипе ATMEGA32U4, этот чип умеет работать с USB напрямую и подключаться к копьютеру как USB-устройство.
Pro Micro ATMEGA32U4 с Aliexpress вполне подойдет. Ссылку приводить не буду, просто зайдите на сайт Али и сделайте поиск самостоятельно, предложений будет много.
Потребуется спаять небольшую схему:
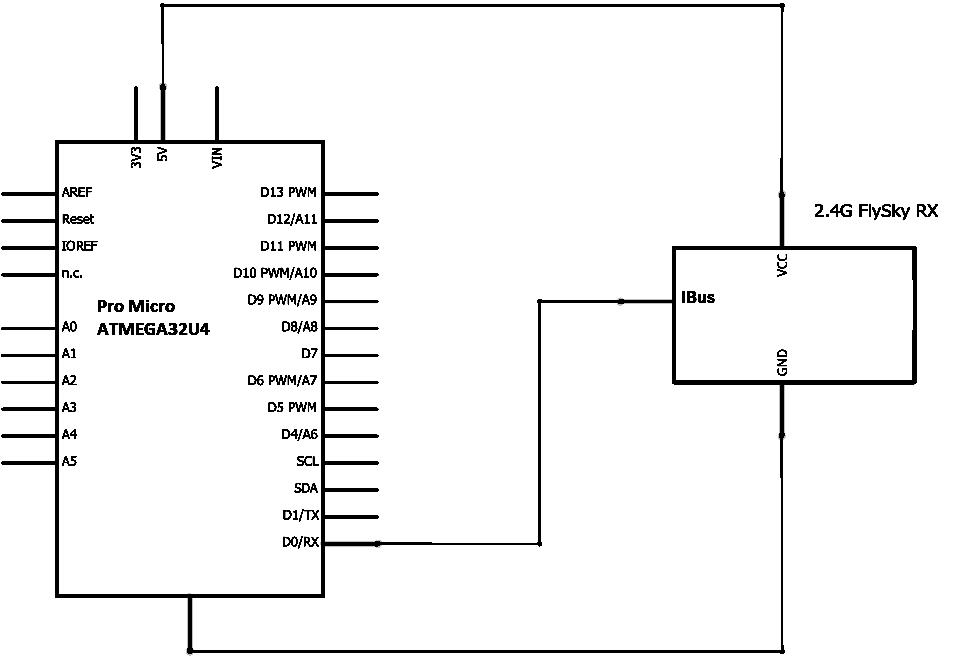
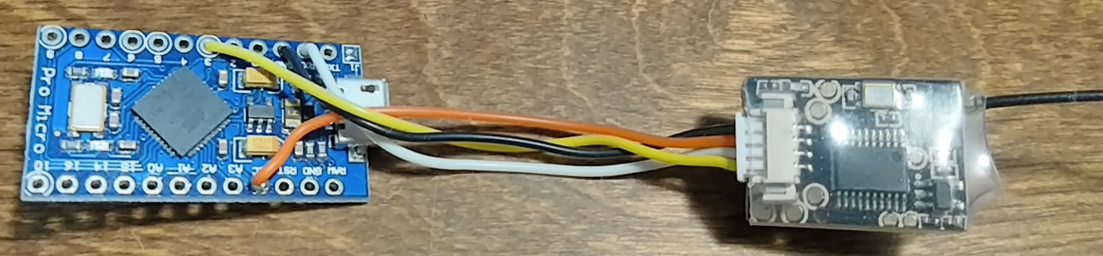
А затем загрузить через ArduinoIDE небольшой скетч, который принимает IBus команды преобразует их и передает по USB, как команды управления джойстиком.
Полный состав программы (с локальными библиотеками) приведен по ссылке ../articles/electronics/flySky_to_pc_from_pc_to_VTX/doc/1636886562IBusJoyst.zip
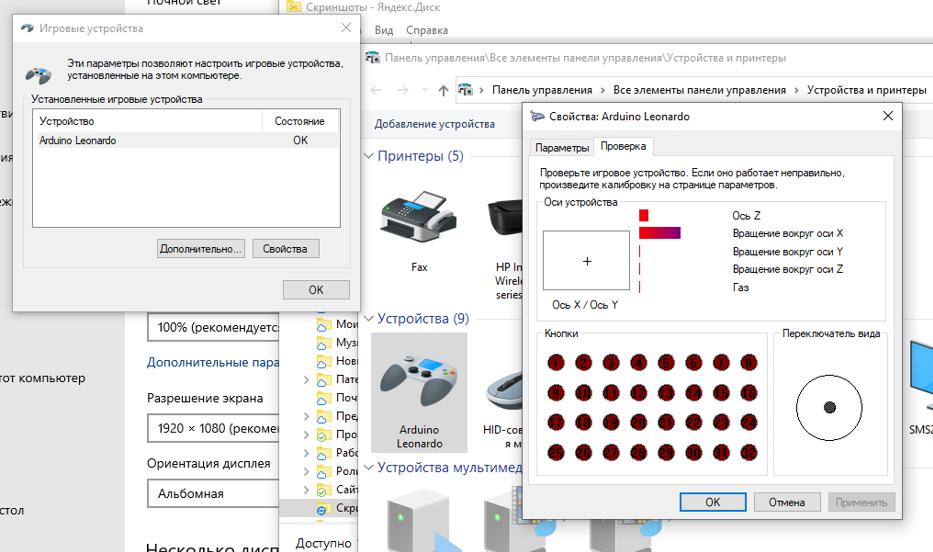
Не забудьте установить библиотеку IBus! Она есть в репозитарии бибилиотек ArduinoIDE. В качестве платы выберете Arduino Leonardo.
Теперь нужно забиндить наш подключенный к ПК приемник на аппаратуру управления. Зайти в симулятор полетов на квадрокоптере LiftOff, и настроить джойстик, у него будет имя Arduino Leonardo/

Теперь уже можно довольно качественно учится управлению квадрокоптером, вы сможете тренировать свои навыки и готовится к летному сезону!
Но по своему опыту, знаю, что в реальной обстановке, когда ты смотришь в видеошлем, а не на экран компьютера, все представляется по другому и опять уйдет некоторое время на вашу адаптацуию к новому виду зрения. Поэтому получать симуляцию сразу в шлеме, это очень хорошее предложение.
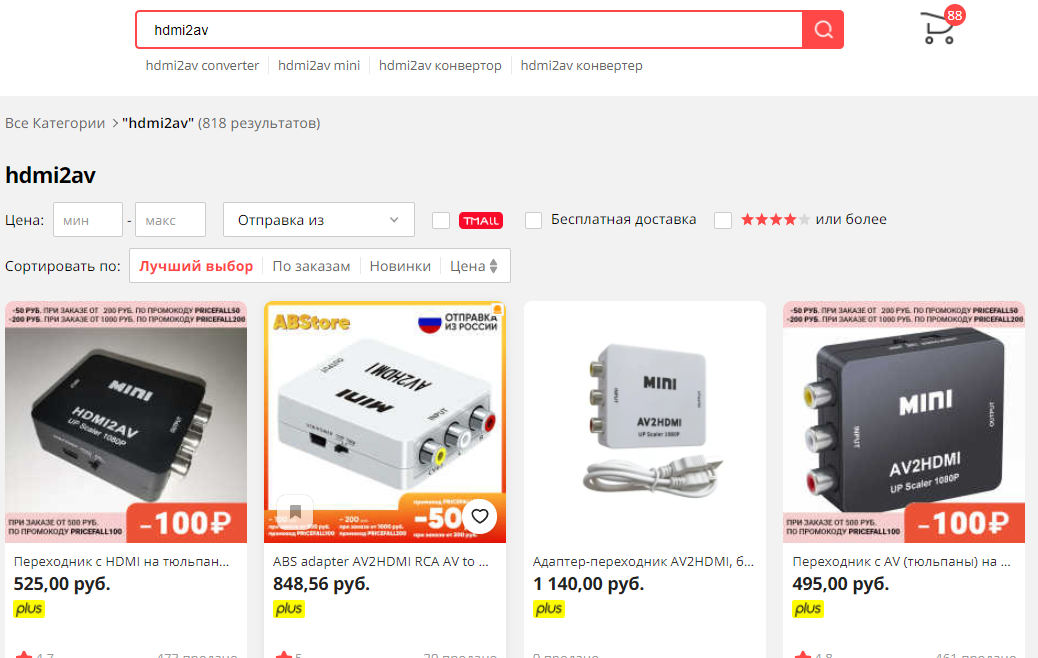
нам потребуется два устройства, первое , это преобразователь сигнала с видеокарты в аналоговый сигнал, в моем случае это HDMI к AV, но есть подобные конвертеры для VGA и DVI.
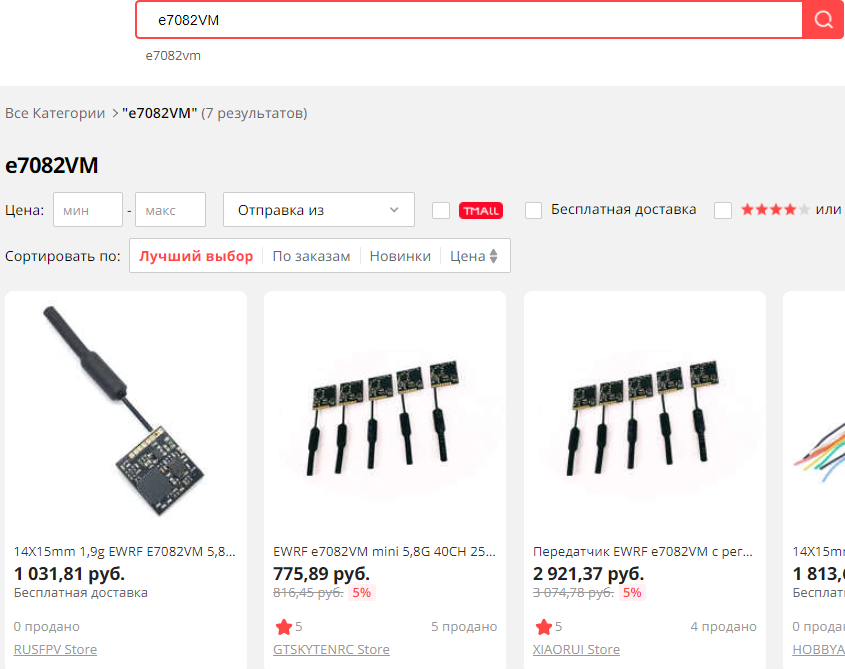
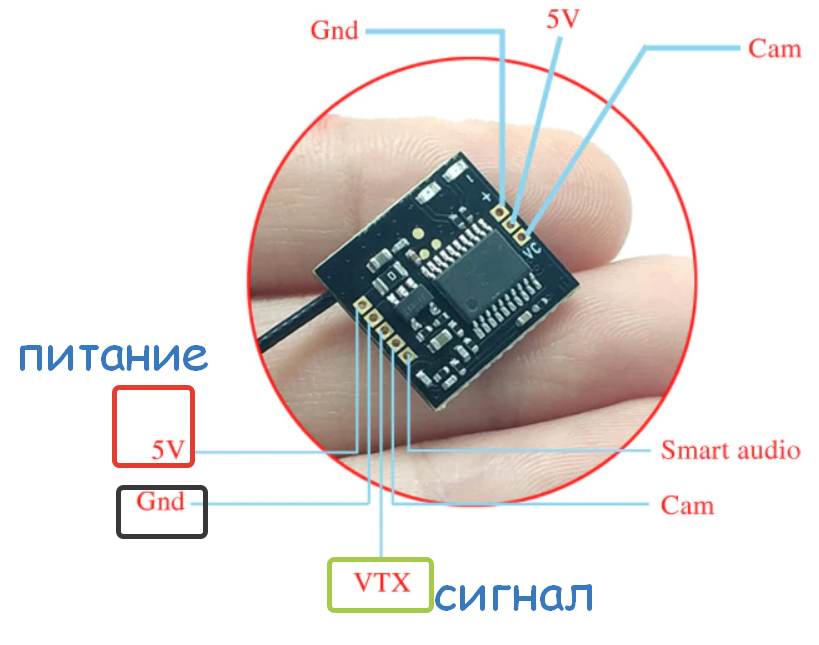
Далее нам потребуется простейший маломощный видеопередатчик, такие ставят на маленькие дроны:
Соединяем питание обоих устройств, питаем передатчик от конвертера: GND можно взять с антенного выхода, +5 вольт я взял с питания по USB конвертера (рисунок ниже).
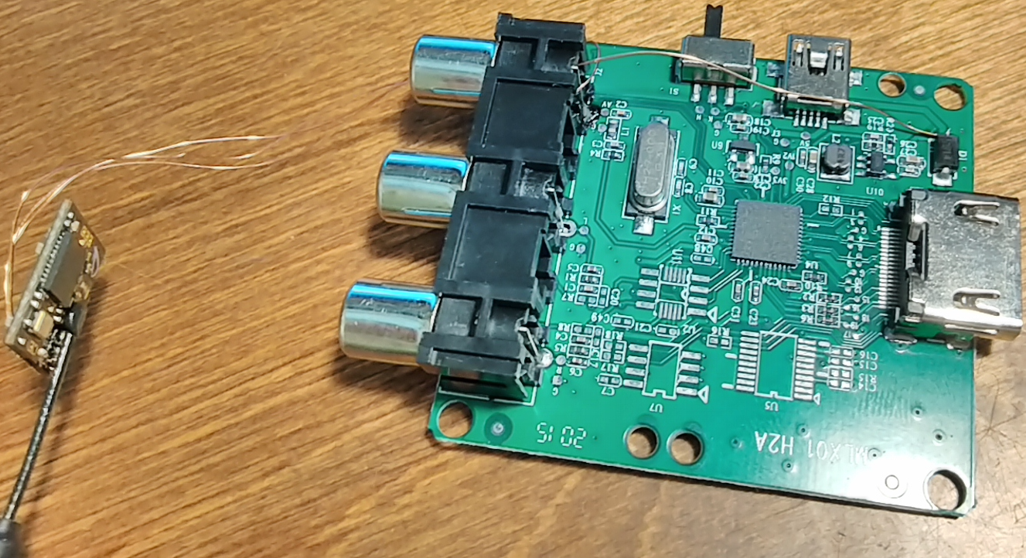
У VTX нам потребуются только выделенные контакты: VTX подпаиваем к центральной жиле аналогового видеоразьема.
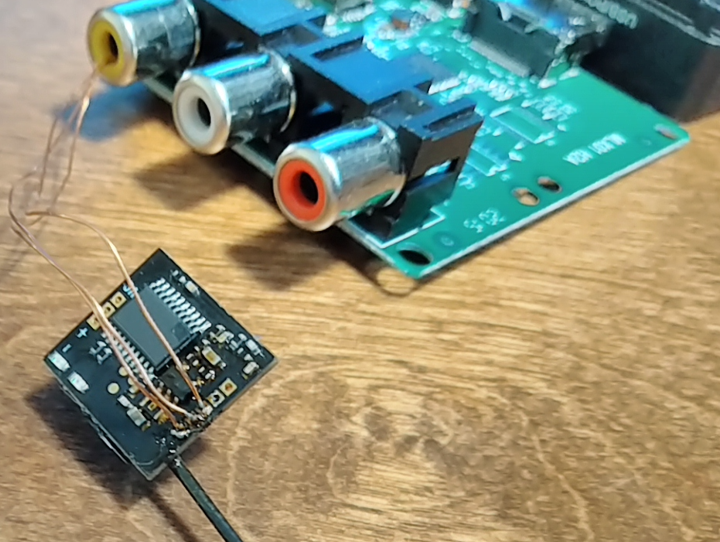
Подключите полученное устройство к питанию и к HDMI, в FPV-очках сделайте поиск и найдите канал на котором транслирует видео ваш VTX. Все готово тренируйтесь! На ПК у вас появится настройка для второго монитора.
ОСТАВИТЬ КОММЕНТАРИЙ
Форма авторизации
ВОЙТИ С ПОМОЩЬЮ:
ИЛИ Авторизация на сайте: