
X
Недавно был доработан алгоритм балансировки, который мы опробовали на примере робота с колесами на шаговых моторах
Чтобы более детально понять, о чем идет речь, покажу самого робота (внизу статьи будет ссылка на Ютуб ролик по его сборке):
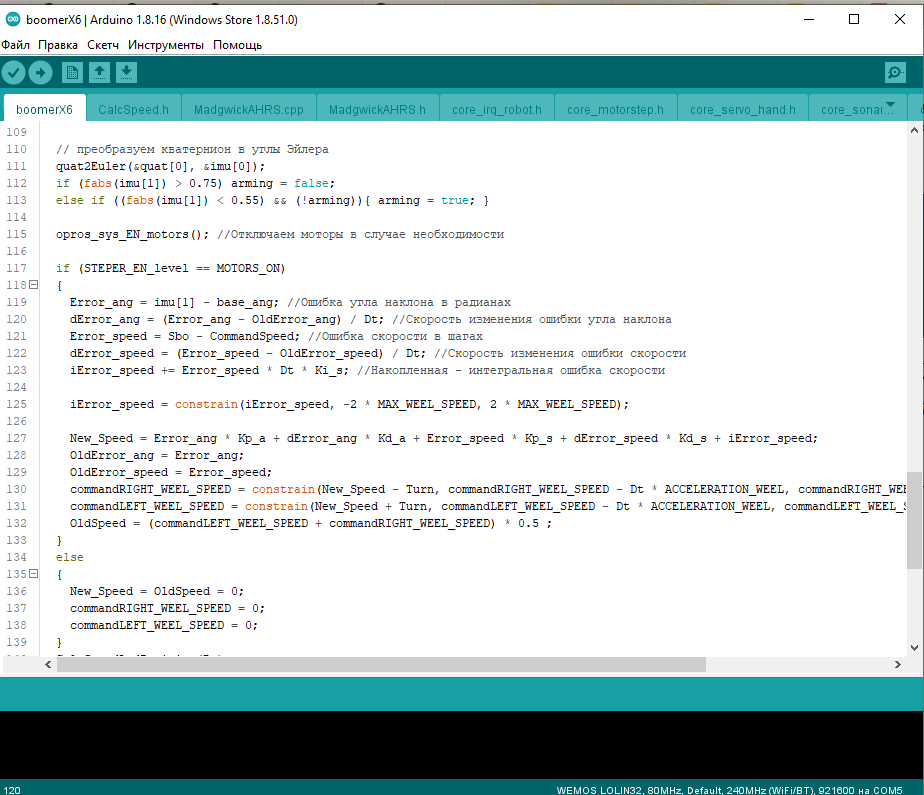
Схема обновленного робота:
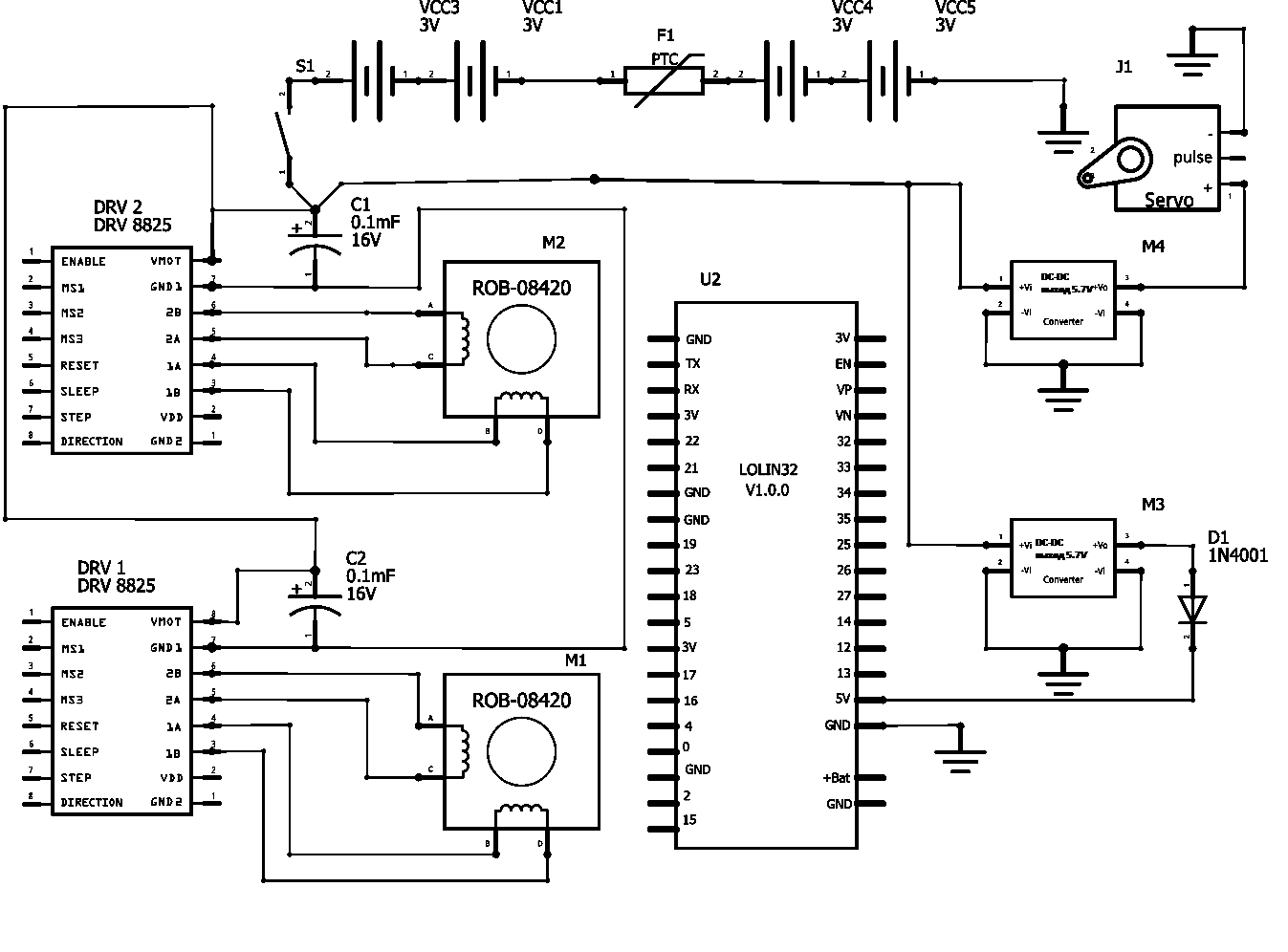
Схема электропитания
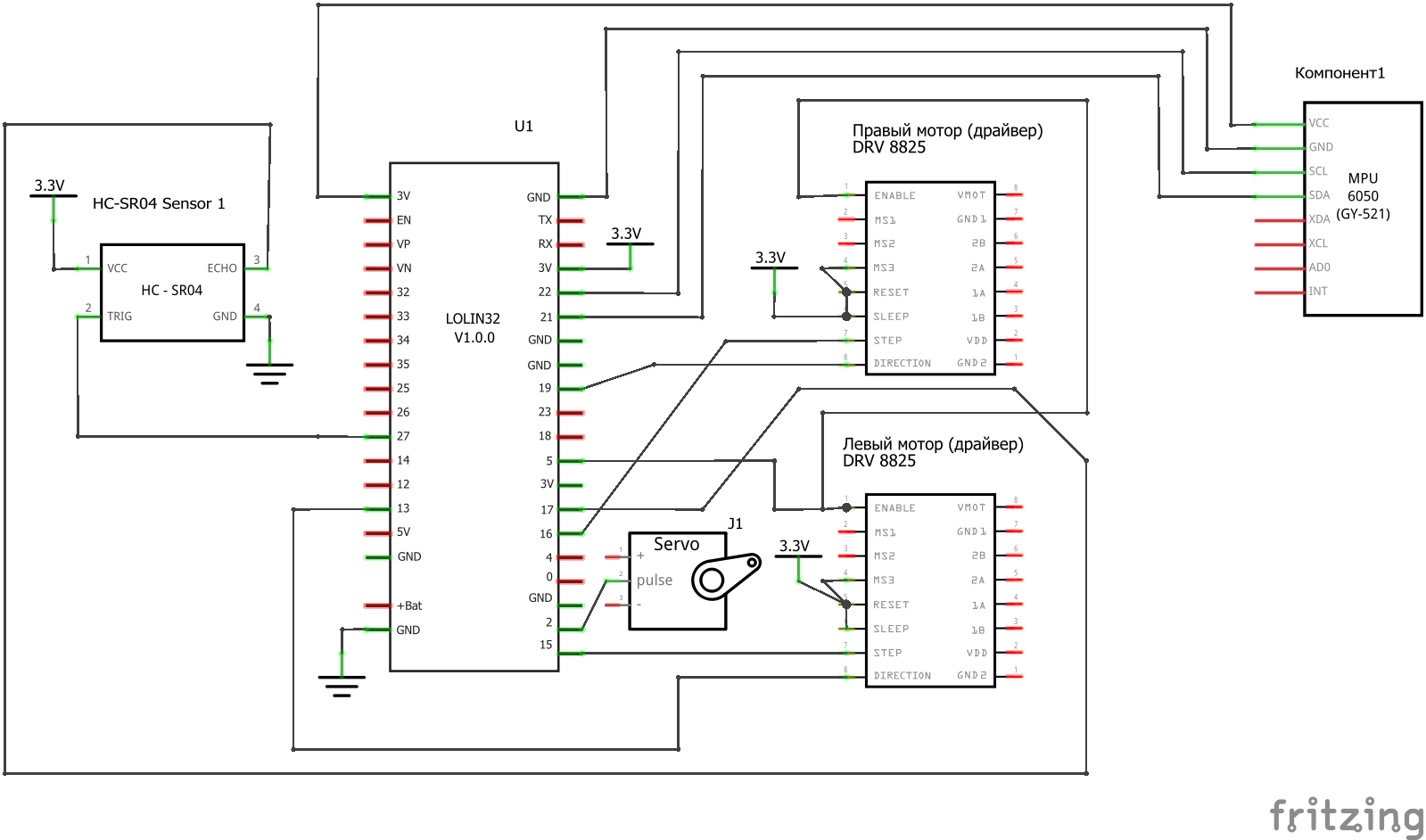
Схема управления робота
Изменения:
- Предыдущий алгоритм балансировки был основан на комплементарном фильтре по одной - анализируемой оси, обновленный использует фильтр Маджвика с расчетами в кватернионах и переводе в углы поворота для всех осей.
- В предыдущем алгоритме длина шага могла быть изменена прямо в функции по прерыванию, что давало ряд ограничений по длине шага и имело большую сложность понимания. В новом алгоритме длина шага для мотора пересчитывается периодисчески раз в 5 миллисекунд.
- Для нормальной работы фильтров Маджвика и Кальмана (встроенного в MPU6050) положение гироприбора измененино с вертикального на горизонтальное.
- Сама формула балансировки значительно изменилась с сохранением основных принципов, но стала немного мягче!
Остальные принципы сохранены!
Ссылка на загрузку "полный программный код"
/articles/programming/new_in_self-balance/doc/163655246111.pdf
ОСТАВИТЬ КОММЕНТАРИЙ
Форма авторизации
ВОЙТИ С ПОМОЩЬЮ:
ИЛИ Авторизация на сайте: